

Tilting type vertical taking-off and landing unmanned aerial vehicle
A technology for vertical take-off and landing and unmanned aerial vehicles, which is applied to vertical take-off and landing aircraft, unmanned aerial vehicles, rotorcraft, etc. UAV cruising time and other issues, to achieve the effect of saving power loss, avoiding inability to tilt, and reducing resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
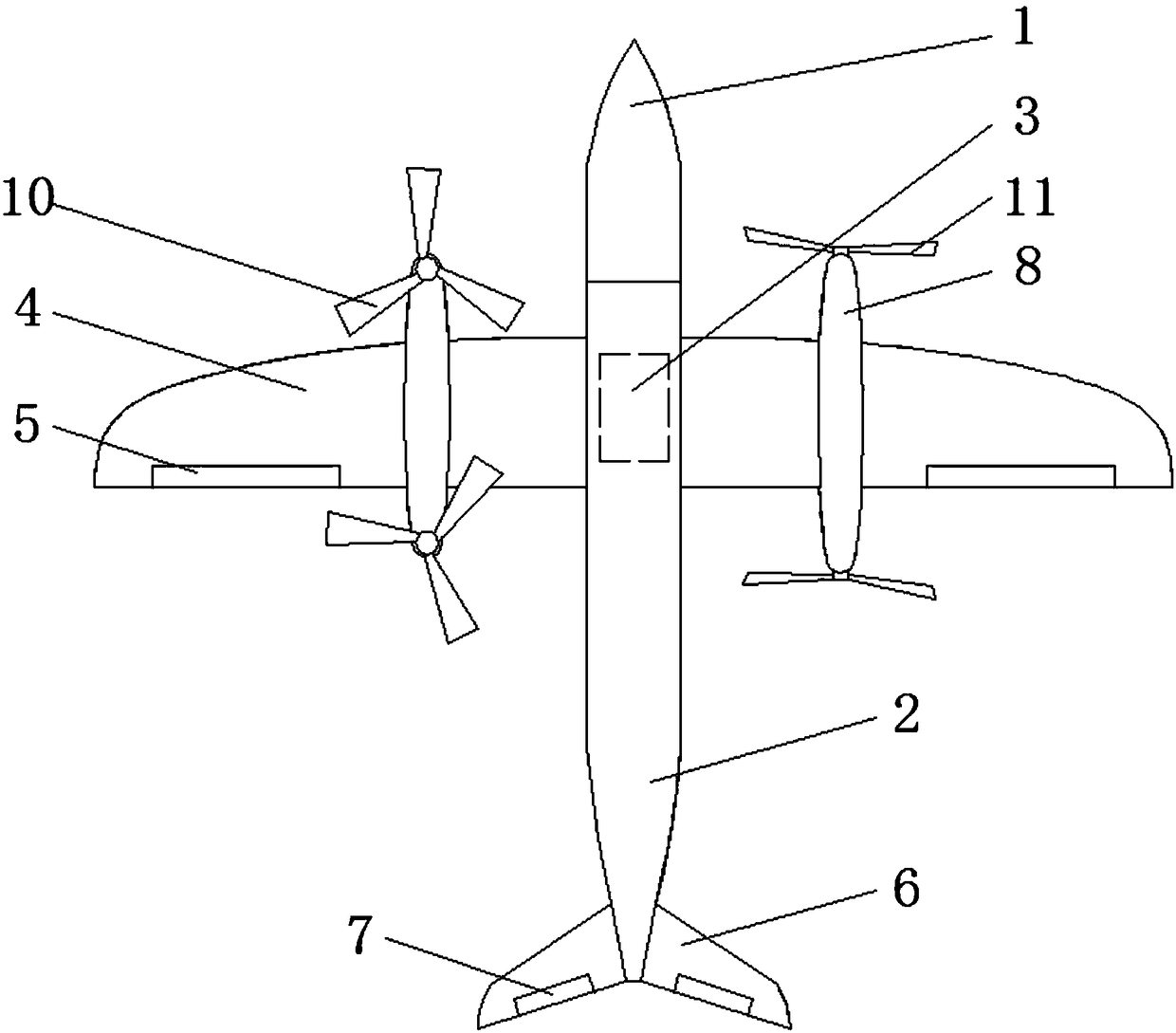
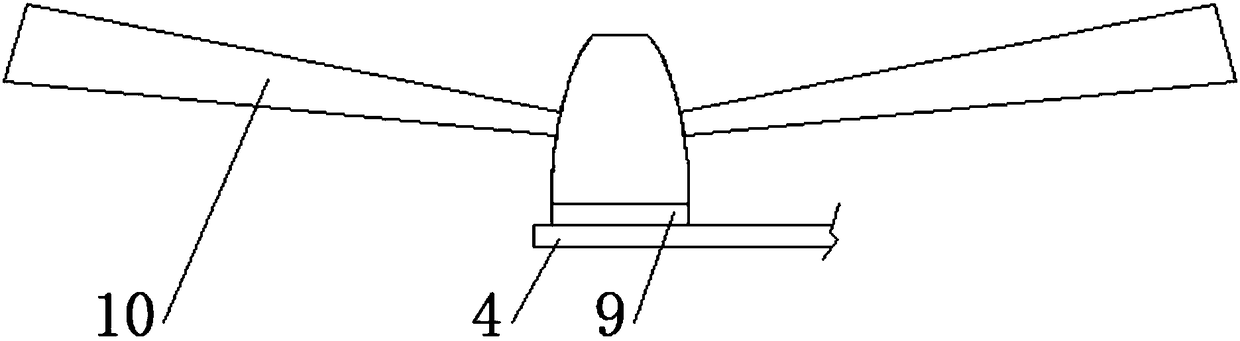
[0013] refer to Figure 1 to Figure 2 It can be seen that a tilting vertical take-off and landing unmanned aerial vehicle includes a mission cabin 1 and a fuselage 2, the mission cabin 1 and the fuselage 2 are integrally connected, and the fuselage 2 is provided with a flight control device near the mission cabin 1 The cabin 3 and the fuselage 2 are located on the left side and the right side of the flight control equipment cabin 3. Wings 4 are arranged. The two wings 4 are symmetrically arranged, and the wings 4 are provided with ailerons 5. The fuselage 2 The empennage 6 is provided at the tail ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More