

Four-wheel-drive robot automatic steering method based on extended Ackerman algorithm
An automatic steering and robot technology, which is applied in the direction of automatic steering control components, electric steering mechanisms, steering mechanisms, etc., can solve the problems of inability to rotate around the same center, low robot adaptability, and large deviation from the center of the circle. Mann steering, high economic and social benefits, and the effect of movement coordination and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In this embodiment, an automatic steering method for a four-wheel drive robot based on the extended Ackerman algorithm is applied to a machine motion platform system that integrates a power system and a control system. The power system mainly uses four independently driven hub motors, two Connect the steering motor of the gear steering mechanism; the control system includes the upper control system of the industrial computer, the bottom driver control system, RS-485 serial communication and remote control / automatic control mode to coordinate its motion control.
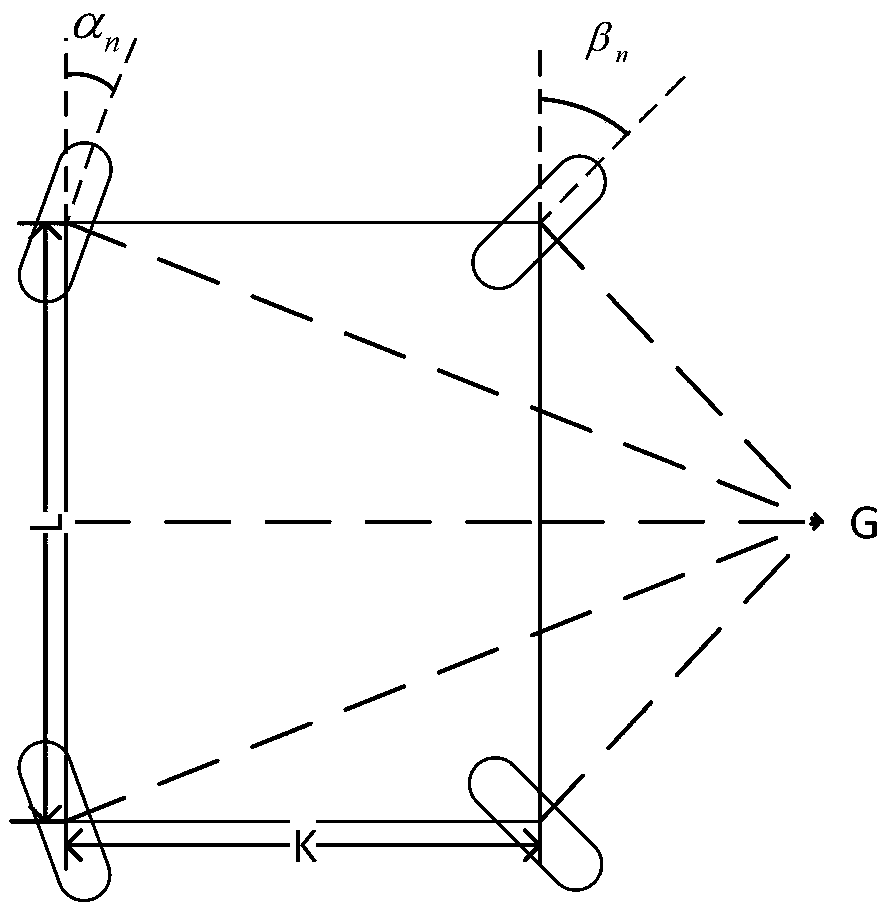
[0020] The basic requirement for the four-wheel drive robot to successfully complete the steering is that the wheels do pure rolling. In order to meet this requirement, when the four-wheel drive robot is turning, the axis lines of each wheel should pass through the same instantaneous center axis. This axis is perpendicular to the ground, and its projection point is as follows: figure 1 Point G in the middle, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More