

Simulation control method for motion characteristics of multi-degree-of-freedom motor
A technology of motion characteristics and analog control, applied in simulators, general control systems, control/regulation systems, etc., can solve the problems of difficult control, difficult accurate positioning, and complex running trajectories of the control system, reducing the development cycle and overcoming the input The effect of impact and high control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
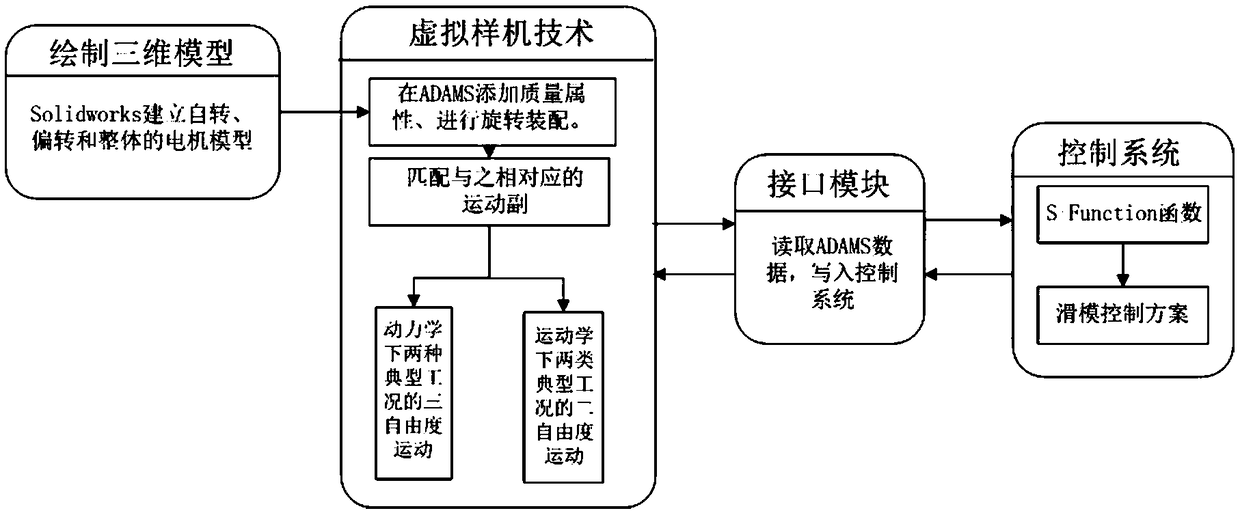
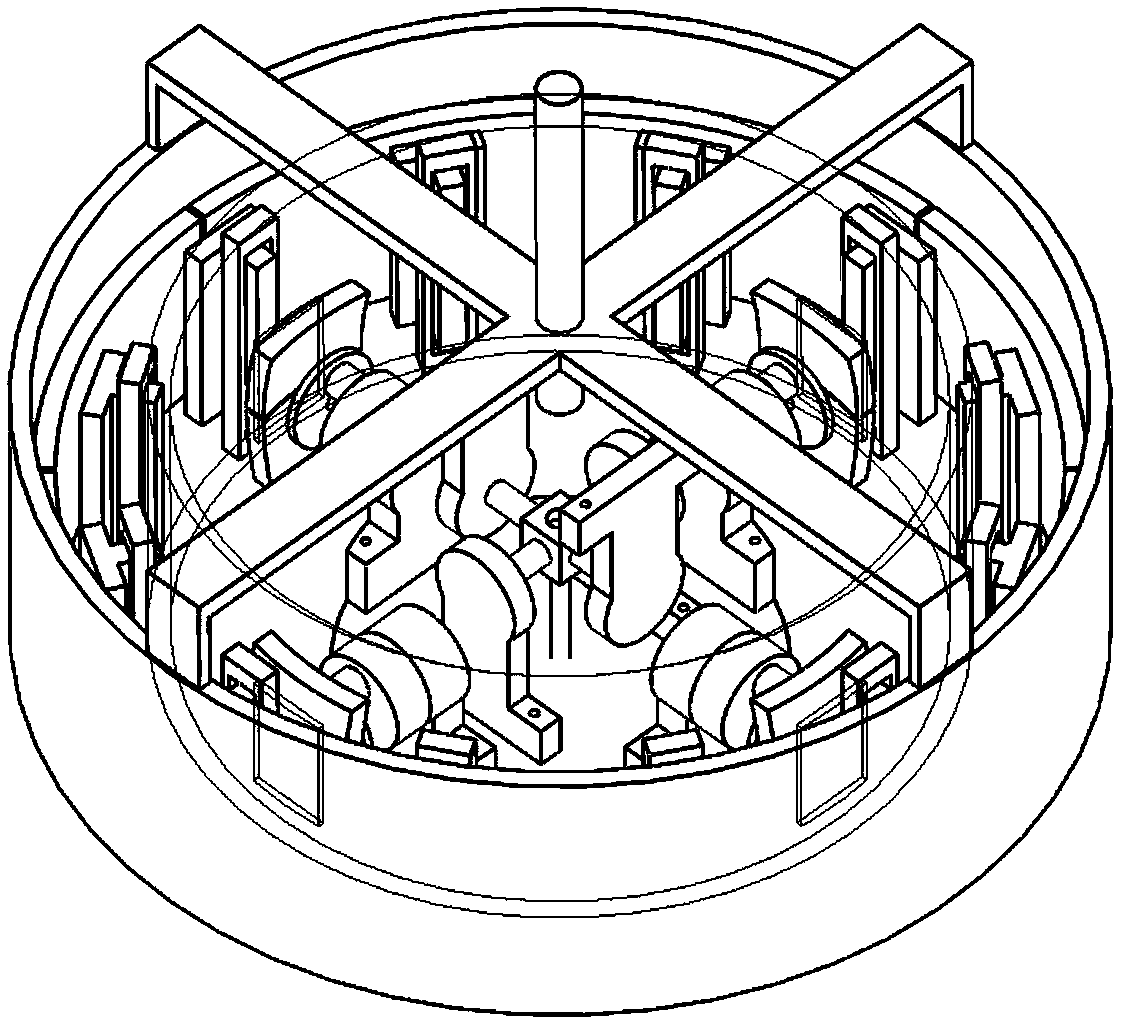
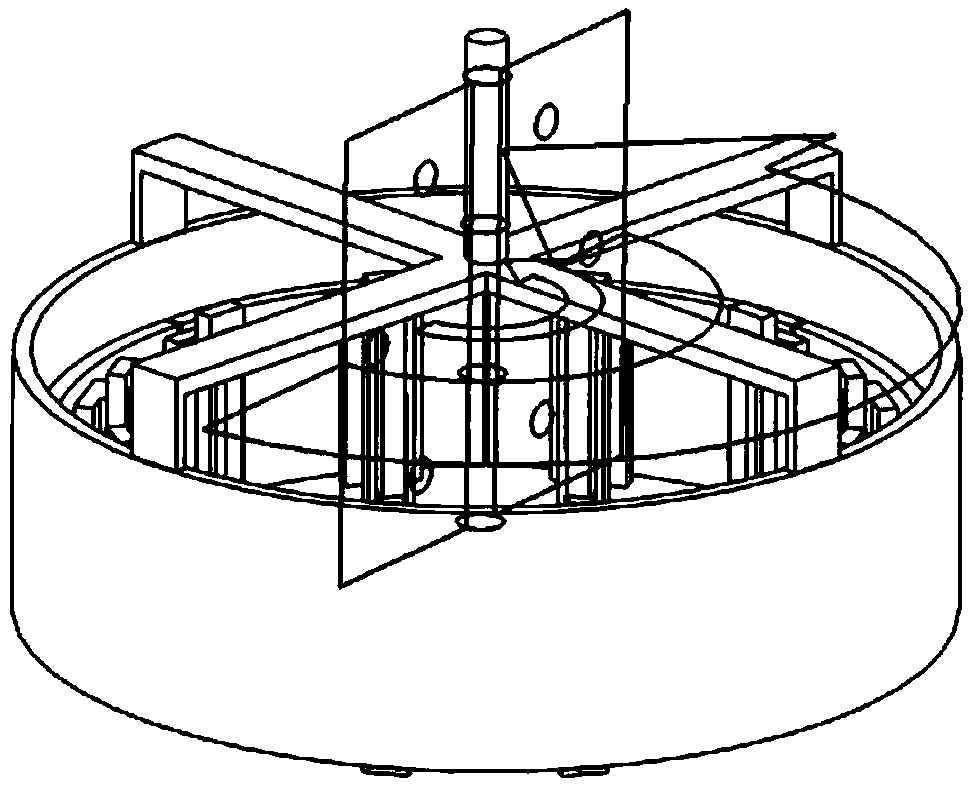
[0074] refer to Figure 1-Figure 21 and Figure 24-Figure 27 . The present invention will now be described as a specific implementation mode provided by the present invention. The present invention a kind of multi-degree-of-freedom motor motion characteristic simulation simulation control method, it is characterized in that comprising the following steps:
[0075](1) The kinematic structure of the inner rotor with the output shaft of the multi-degree-of-freedom motor and the outer rotor connected to the casing is regarded as a combination of one type of electric...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More