

A six-degree-of-freedom industrial robot
An industrial robot and degree-of-freedom technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of high environmental requirements and inability to assemble robots, achieve good meshing, eliminate return errors, and reduce wear and tear.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
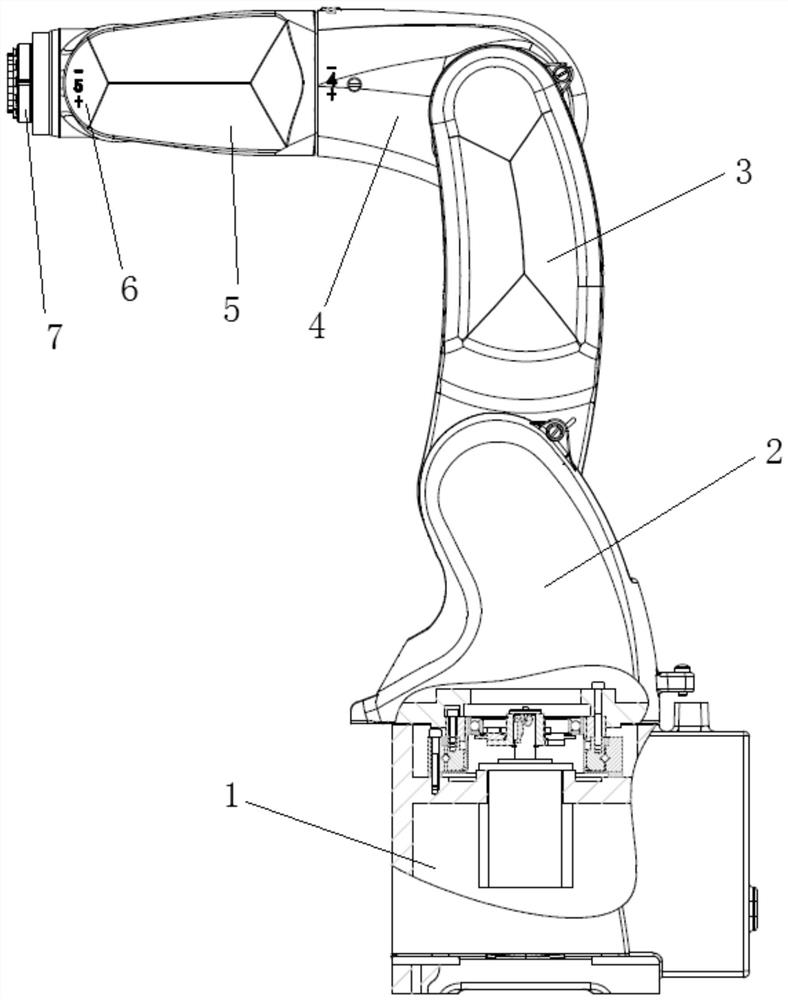
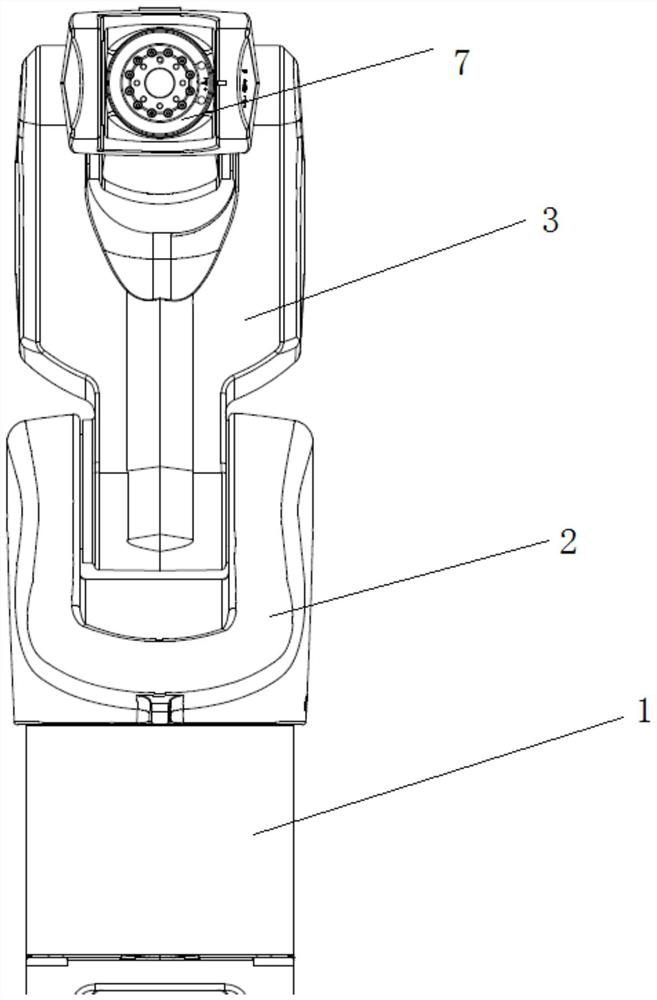
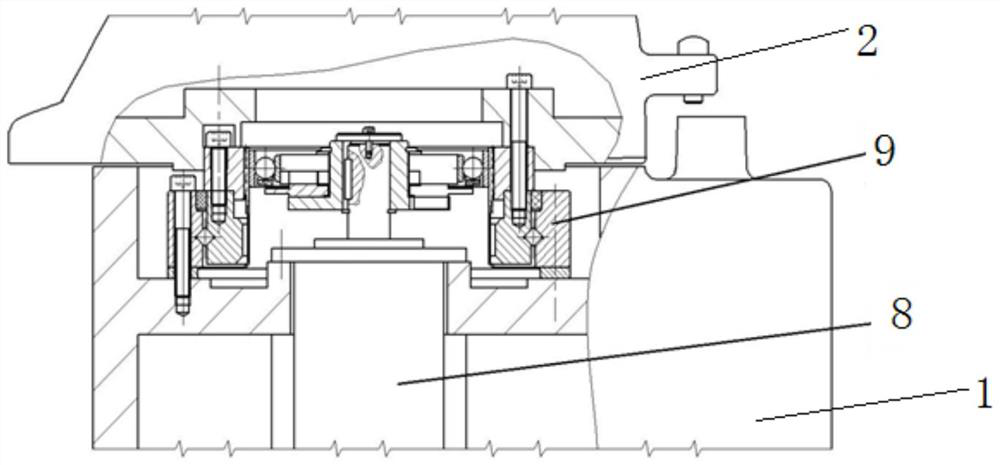
[0035] A six-degree-of-freedom industrial robot, its structure is as follows figure 1 , 2 As shown, it includes machine base 1, waist 2, upper arm 3, forearm 4, rotating wrist 5, swinging wrist 6, end effector 7 connected in sequence, end effector 7 is connected with the workpiece to be operated, and the swinging wrist 6 and the rotary wrist 5 transmit power through a micro-motion mechanism. A fifth motor is arranged in the rotary wrist 5, and the connection between the swing wrist 6 and the rotary wrist 5 is connected by a fifth harmonic reducer. The micro-motion mechanism is as follows: Figure 6 , 7As shown, it includes a transmission gear 21 meshing with the rotation shaft of the fifth motor and the drive shaft of the fifth harmonic reducer respectively, and the transmission gear 21 is connected with the rotation shaft 16 of the fifth motor and the drive shaft of the fifth harmonic reducer The meshing part of 17 is fixed with a sheet 22, the profile of the sheet is coaxi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More