

A substation patrol robot road scene recognition method based on depth learning
A patrol robot and scene recognition technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve the problems of low recognition efficiency, low recognition accuracy, large model, etc., achieve strong environmental adaptability and ensure recognition accuracy , the effect of strong environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0053] The specific implementation manners of the present invention will be further described below in conjunction with the drawings and examples.
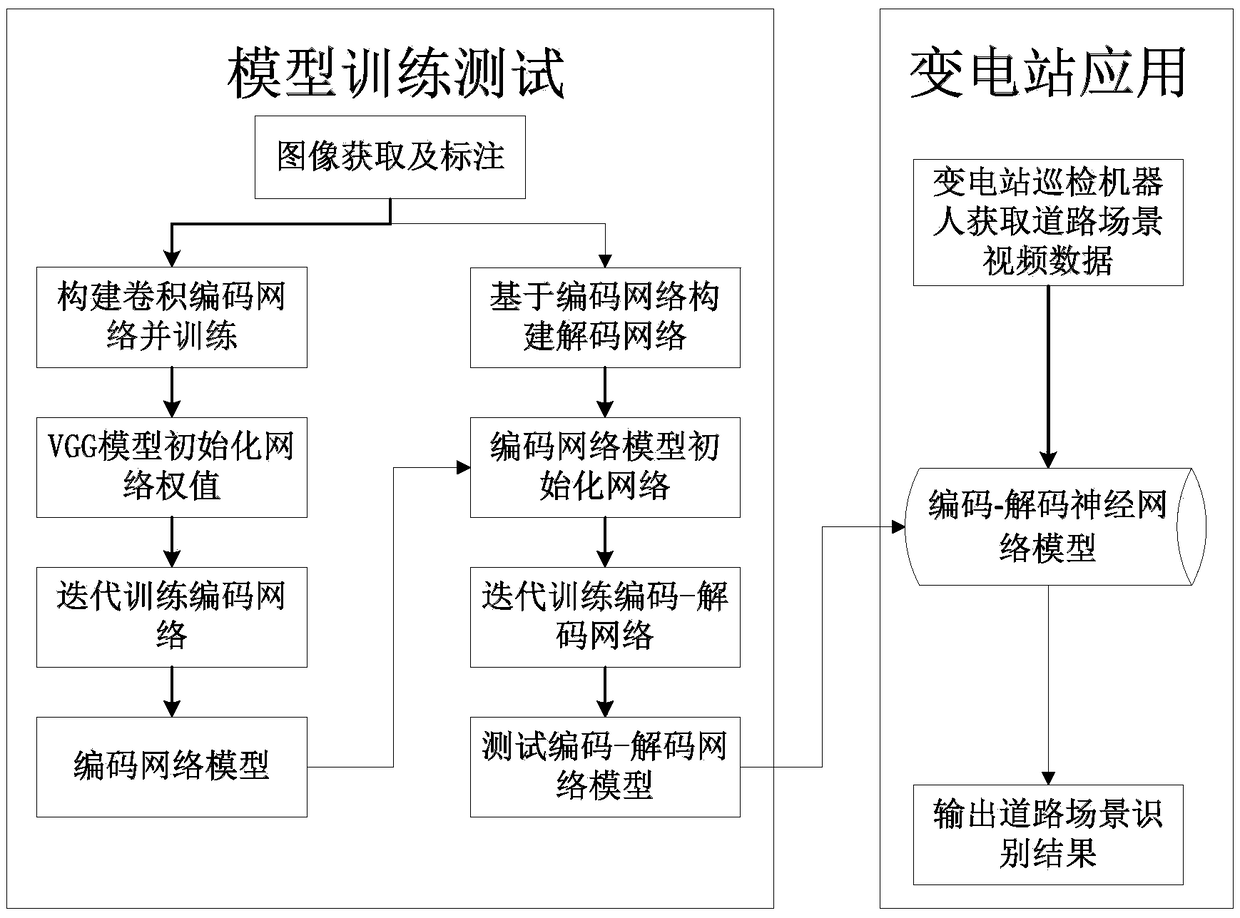
[0054] The present invention according to figure 1 The middle process is implemented. First, the actual substation inspection robot is used to collect the road scene images, and then manually annotate the construction data set. Then, the convolutional encoding network and the deconvolutional decoding network are respectively built, and the iterative training is performed sequentially to make the model converge, and finally the road is obtained. Scene recognition network model. The experiment uses the Nvidia JetsonTX2 embedded development board as the development platform, and builds the Caffe deep learning framework and the corresponding CUDA library under the Ubuntu 16.04 operating system to train and test the substation road image recognition model. Recognition of road scenes.
[0055] The specific implementation of the presen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More