

A method to improve the calibration accuracy of industrial robot tool coordinate system
A tool coordinate system and industrial robot technology, which is applied in the field of improving the calibration accuracy of industrial robot tool coordinate system, can solve the problem of low trajectory tracking accuracy, and achieve the effect of eliminating operation errors, ensuring trajectory accuracy, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
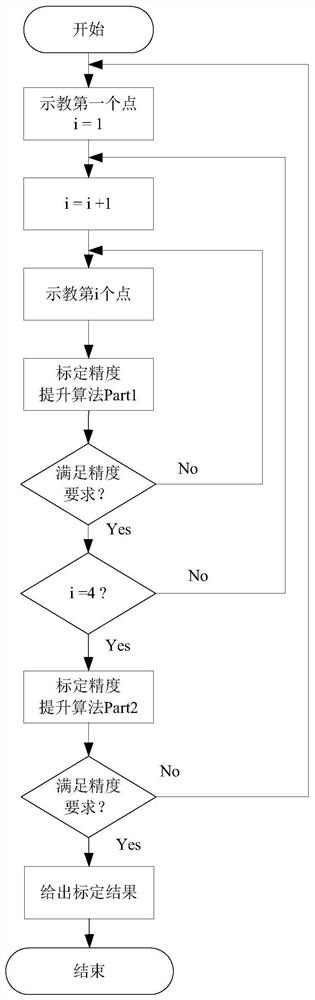
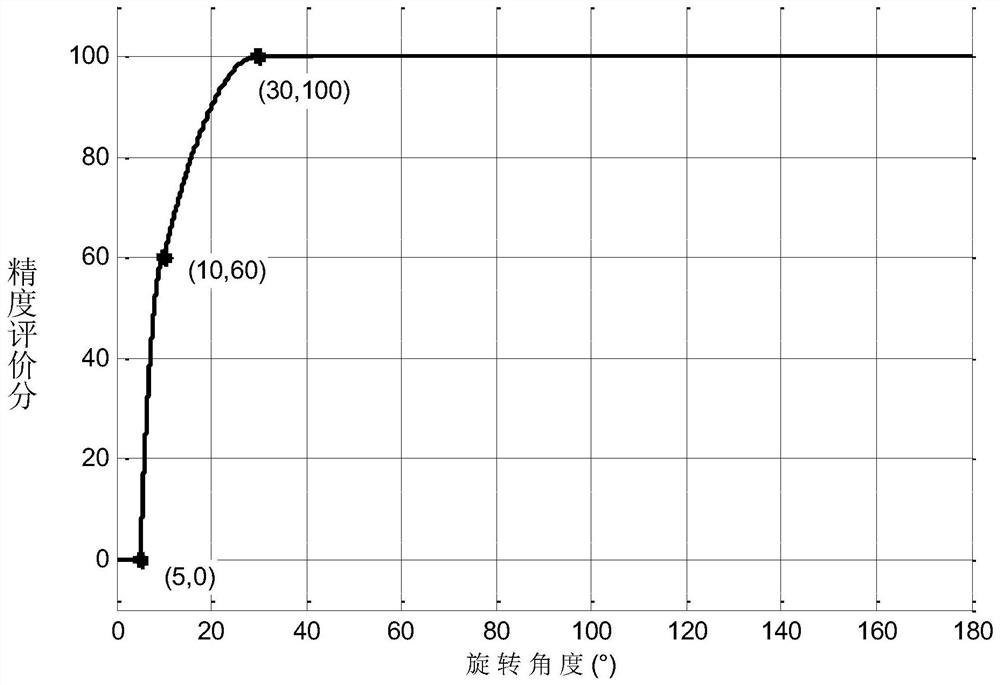
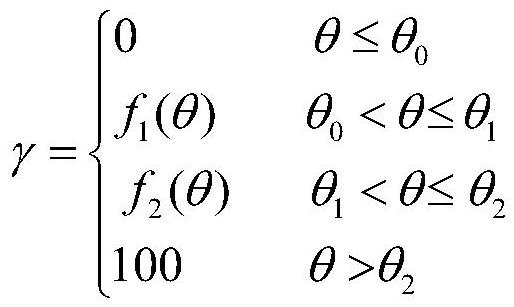
[0046] Taking a general-purpose six-joint as the experimental object, the specific accuracy evaluation criteria are selected as follows, as attached figure 2 shown.
[0047]
[0048] 1. The first calibration point of the teaching record is: (655.95, -302.35, 394.36, 100.29, 19.93, 160.18);
[0049] 2. According to the real-time evaluation scores obtained by the above accuracy evaluation criteria, the final selection of 234 calibration points is: (600.91, -302.35, 305.42, 94.02, 21.98, 142.77), (633.46, -391.49, 305.42, 109.86, 21.98, 142.77 ), (655.95, -188.78, 401.75, 104, 46.05, 166.82), the evaluation scores are 82 points, 80 points, 100 points respectively.
[0050]3. Calculate four sets of calibration results according to the four calibration points:
[0051] ①: (99.9873, 200.007, 300.0368);
[0052] ②: (99.95417, 200.0286, 300.0437);
[0053] ③: (99.98198, 200.040798, 300.042966);
[0054] ④: (99.95656, 200.0258699, 300.0429449).
[0055] 4. Calculate the stand...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More