

Method and system for resolving attitude of unmanned aerial vehicle with double controller
A dual-controller and machine-attitude technology, which is applied to instruments, measuring devices, surveying and mapping, and navigation, can solve the problems of truncation error, large amount of calculation, and little influence of nonlinear systems.
Inactive Publication Date: 2019-03-22
SHIJIAZHUANG TIEDAO UNIV
View PDF7 Cites 24 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] The principle of complementary filtering is simple, and it can filter out noise and suppress drift. Because it is not easy to determine the appropriate high-pass and low-pass cut-off frequencies, the accuracy is not high; the combination of conjugate gradient method filtering and complementary filtering in the attitude calculation application, there is iteration The balance between calculation amount and accuracy; EKF and UKF are Kalman filter filtering methods for nonlinear systems. EKF has linearization errors and truncation errors, which have little effect on general nonlinear systems; UKF is in the convergence speed and estimation accuracy. It is higher than EKF, but its calculation amount is larger than that of EKF, and their system noise and observation noise are not easy to determine, and the calculated attitude angle is easily disturbed by noise
At the same time, the large amount of calculation of EKF and UKF will have a great impact on the real-time performance required in the attitude settlement
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment
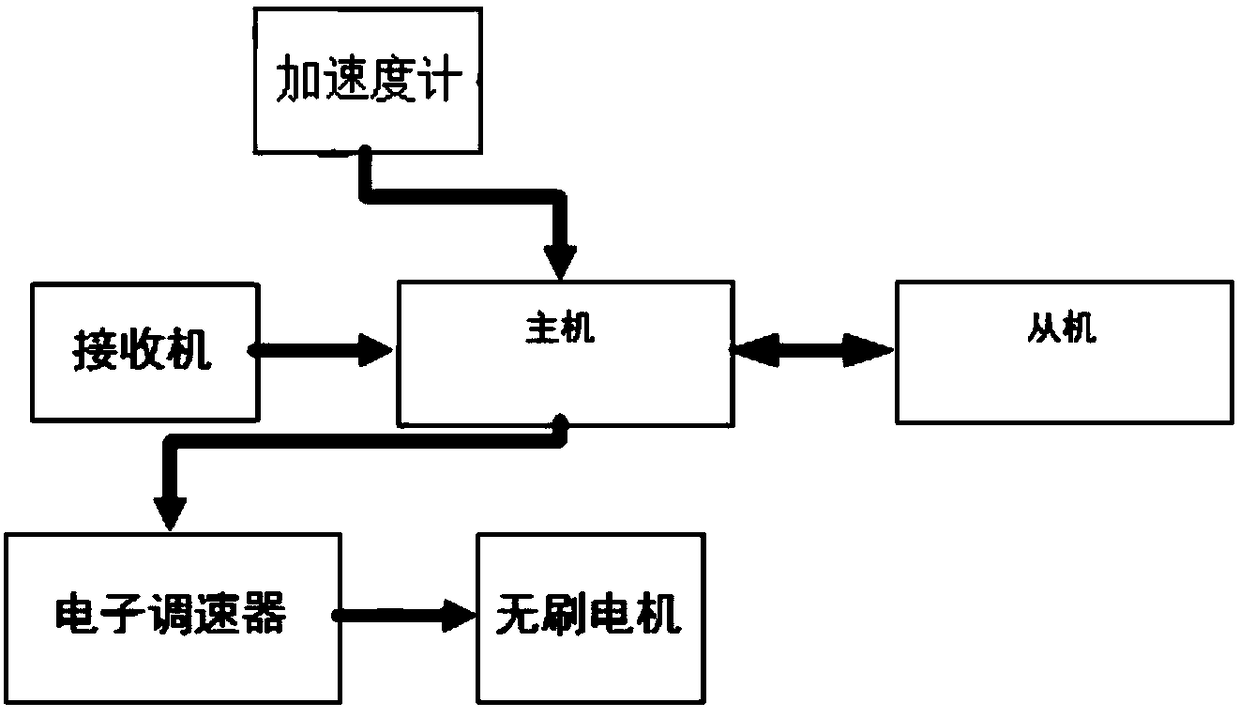
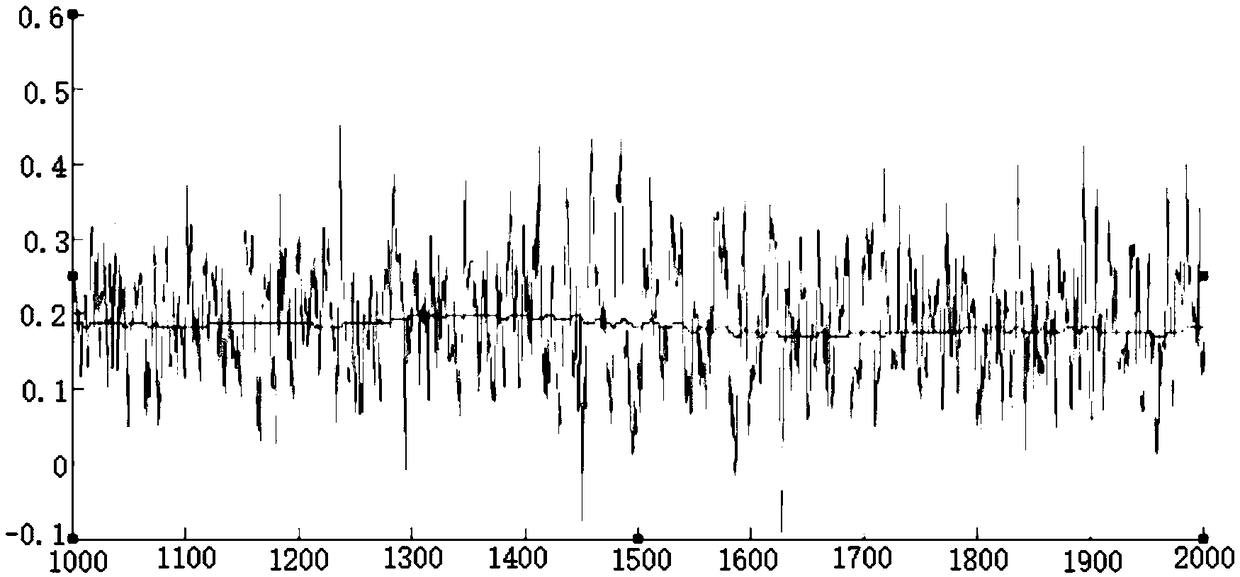
[0085] Using two STM32F407 series single-chip microcomputers, one single-chip microcomputer is used as the host to obtain data from the gyroscope, accelerometer and magnetometer, and performs complementary filtering to calculate the attitude angle, and the other is used as a slave machine to perform EKF calculations, and USART is used between the two single-chip microcomputers In communication, the attitude angle calculated by the master is transmitted to the slave, and after settlement, the slave feeds back the attitude information to the master to correct the error. At the same time, the data of the two are uploaded to the computer through the serial port, and the drawing can be obtained as follows with MATLAB.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention relates to a method and a system for resolving an attitude of an unmanned aerial vehicle with double controller. An unmanned aerial vehicle attitude resolving system which includes a main engine and a slave engine is arranged; in the main engine, an attitude angle resolved by an accelerometer and an electronic compass is adopted for performing drift compensation on the attitude angleresolved by a gyroscope, a complementary filtering algorithm is adopted for primarily fusing the attitude angle resolved by the accelerometer and the electronic compass with the attitude angle resolved by the gyroscope, noise is filtered and attitude angle drifting is restrained; the attitude angle after complementary filtering is transmitted to the slave engine, an EKF is adopted for promoting the resolving accuracy of attitude angle and the resolved high-precision attitude angle is transmitted by the slave engine to the main engine for attitude compensation and control in the manner of taking 50HZ as a period; the EKF is an expanded kalman filter algorithm; when no attitude angle information is received by the main engine from the slave engine, the attitude angle resolved by the complementary filtering algorithm in the main engine is adopted for controlling attitude. The system provided by the invention can promote the accuracy of resolved attitude and has high practicability.
Description
technical field [0001] The invention relates to the field of unmanned aerial vehicle control, in particular to a method and system for calculating the attitude of an unmanned aerial vehicle with dual controllers. Background technique [0002] With the continuous development of micro-electromechanical system technology (MEMS) and computer technology, low-cost strapdown inertial measurement units (IMUs) are widely used in small aircraft. Strapdown inertial measurement units consist of three-axis gyroscopes and three-axis accelerometers. and electronic compass. Gyroscopes are affected by temperature drift. The long-term running drift is serious, and the integral operation will produce accumulated errors; the accelerometer is easily affected by the carrier vibration and motion acceleration; the electronic compass is easily affected by the external magnetic field. Therefore, these three sensors cannot be used for the measurement of aircraft attitude alone. The fusion of these ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G01C21/16G01C21/18G01C21/08
CPCG01C21/08G01C21/165G01C21/18
Inventor焦永刚滕瑞任彬赵增旭
OwnerSHIJIAZHUANG TIEDAO UNIV