

Intelligent transfer and walking aid robot and motion intention recognition method
A walking aid robot and motion intention technology, applied in the field of medical devices, can solve problems such as unlimited range of motion, high price, difficulty in community rehabilitation and home rehabilitation, so as to avoid secondary training injuries, improve training enthusiasm, and improve rehabilitation efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
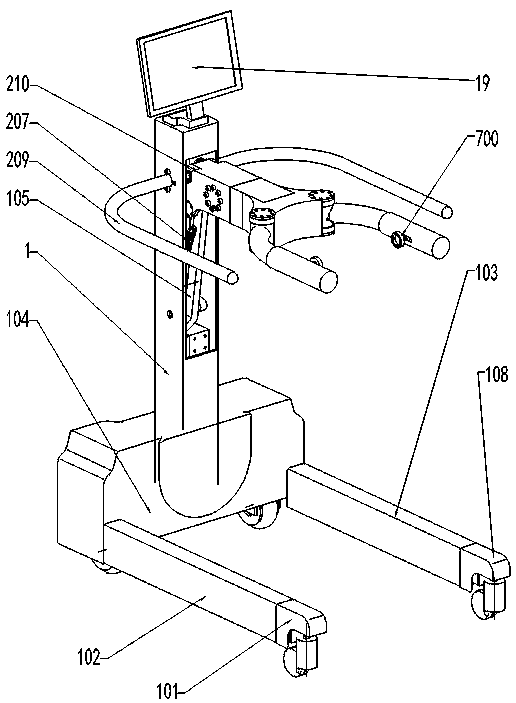
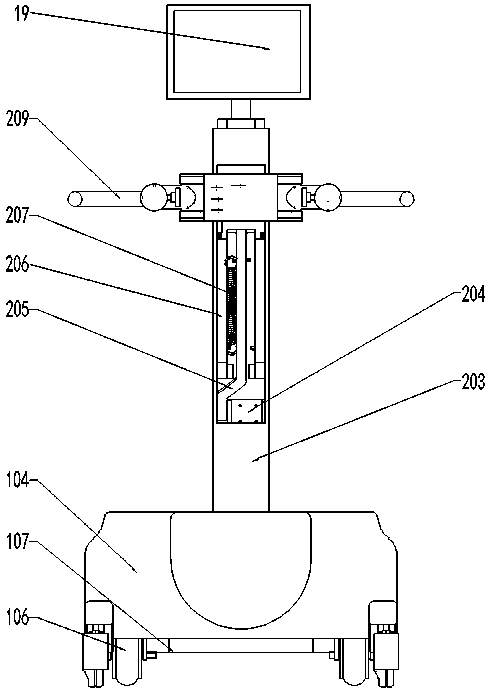
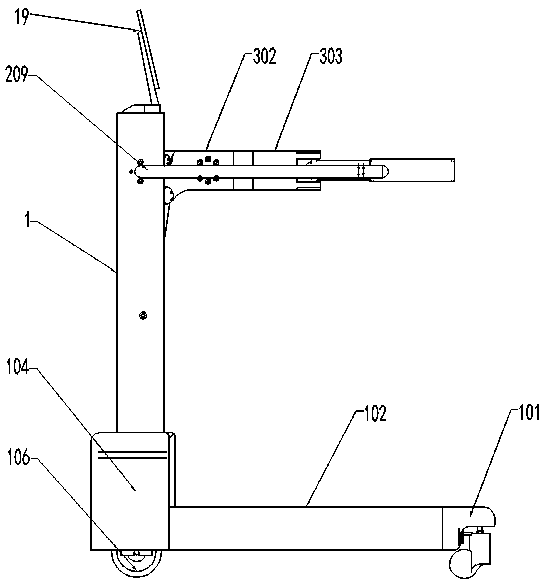
[0043] Examples such as Figure 1-11 As shown, the intelligent transfer walking aid robot includes a column cover 1 with a cavity inside, and a ground differential mobile platform that can drive the whole device to move is arranged under the column cover 1. Sit-stand transfer mechanism for sit-stand action, the sit-stand transfer mechanism is connected with a pelvic support mechanism that is connected with the human body and detects the movement intention of the human body. The pelvis support mechanism, the sit-stand transfer mechanism and the ground differential mobile platform are all controlled by the controller.
[0044] The ground differential mobile platform includes a platform holder, which includes a trapezoidal connecting plate 104 slidably connected to the lower end of the column cover 1 , and the column cover 1 can slide up and down on the connecting plate 104 .
[0045] A first side rectangular steel 102 and a second side rectangular steel 103 are fixedly installed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More