

A Fast and Complete Trajectory Planning Method for Autonomous Driving
A technology of automatic driving and trajectory planning, applied in navigation, instrumentation, surveying and navigation, etc., can solve problems such as time-consuming ascent, time-consuming solution process, and descent
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
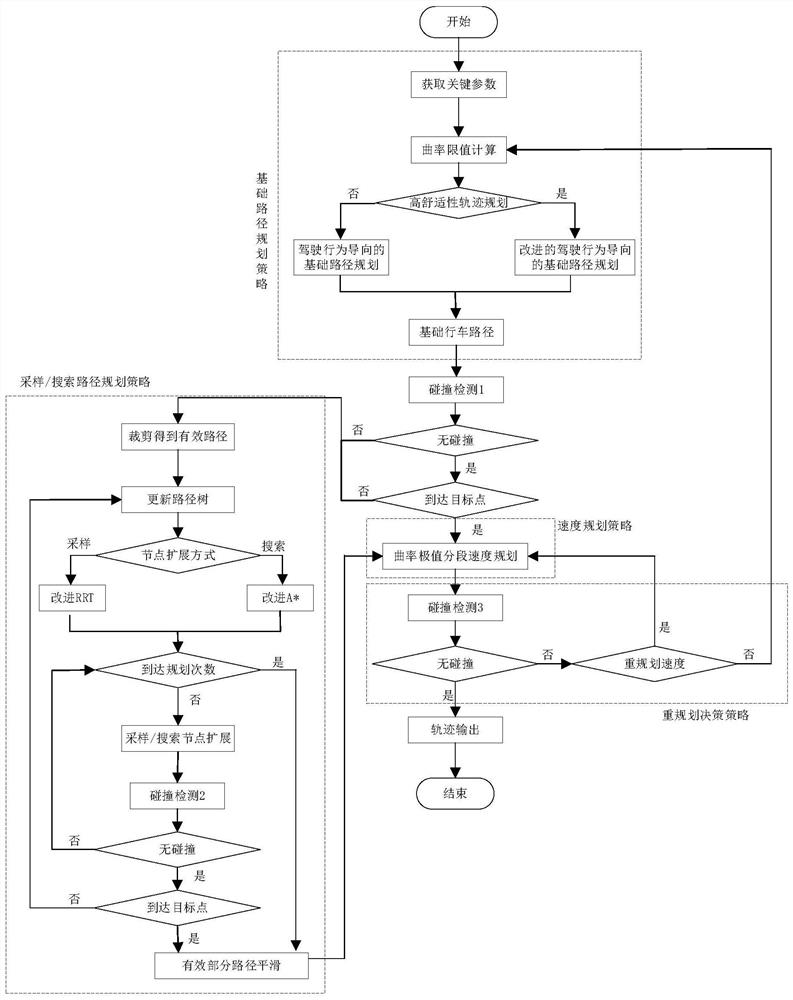
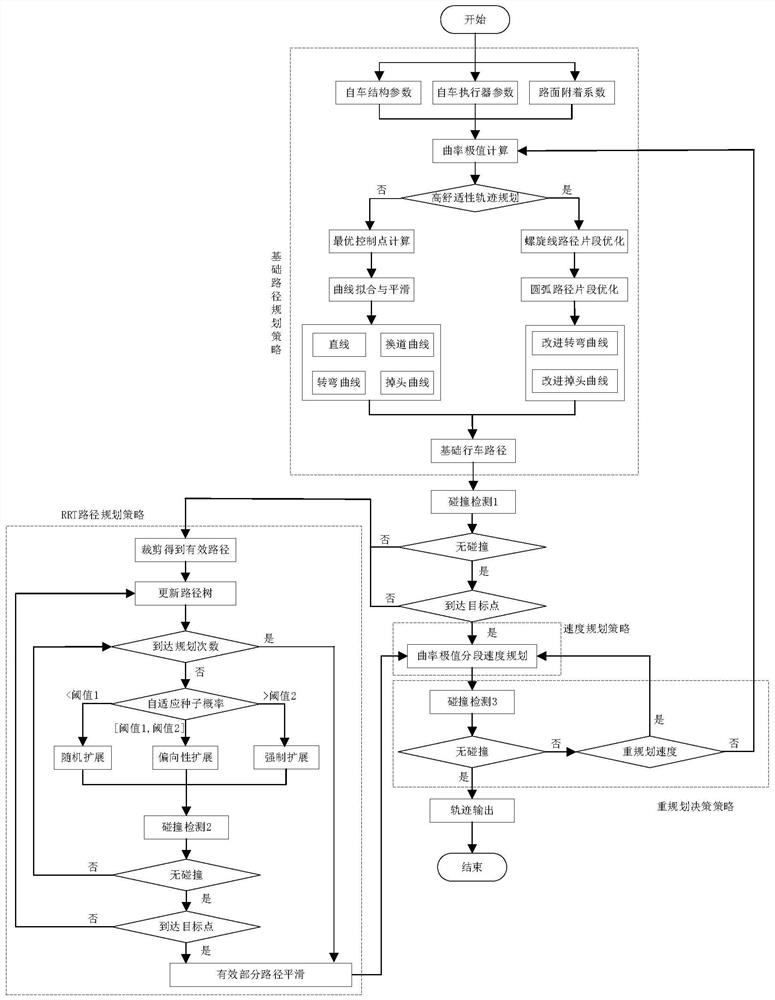
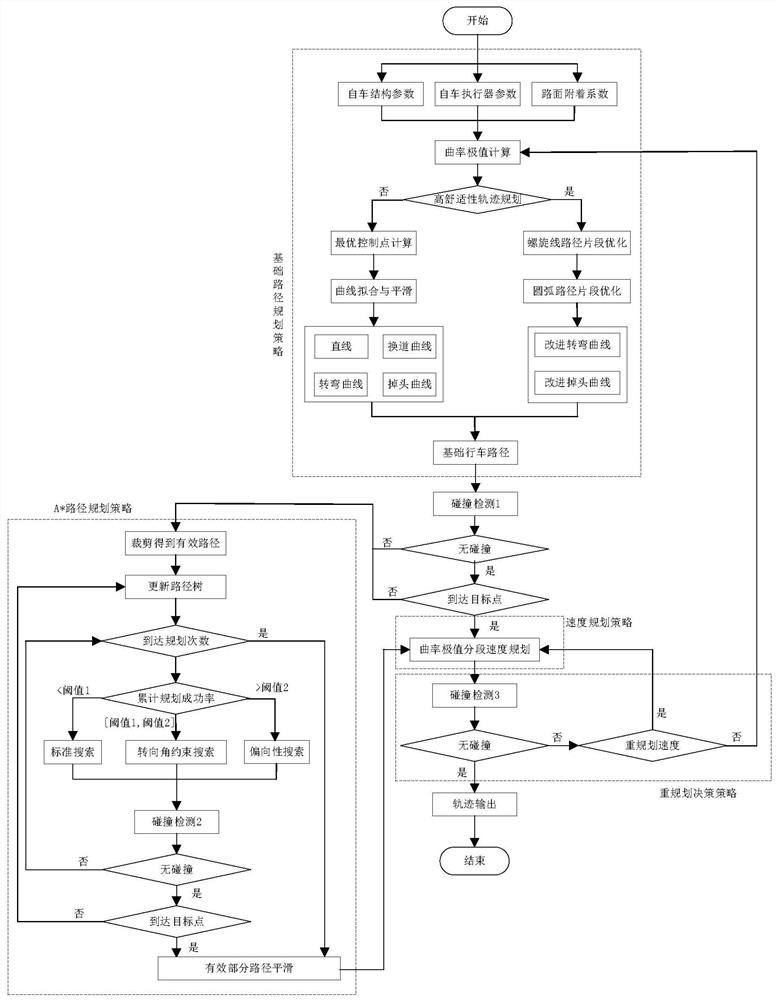
[0149] figure 1 It is a flow chart of the rapid and complete automatic driving trajectory planning strategy of the present invention, figure 2 and image 3 It is a flow chart of two different implementations of the rapid and complete automatic driving trajectory planning strategy of the present invention. The specific steps of the method include:
[0150] Step 1: If figure 1 As shown, the key parameters of the vehicle are obtained, including vehicle structure parameters, vehicle actuator performance parameters and road characteristic parameters. Among them, vehicle structural parameters include wheelbase, wheel base, vehicle length, vehicle width, vehicle weight, center of mass position, etc., vehicle actuator performance parameters include maximum vehicle speed, minimum vehicle speed, maximum acceleration, minimum acceleration, etc., road characteristic parameters include road surface Adhesion coefficient, road surface roughness, etc.;
[0151] Step 2: If figure 1 As s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More