

Slip form fault-tolerant control method for multi-agent tracking system with executor and sensor faults
A sensor failure and tracking control technology, applied in the direction of target-seeking control, adaptive control, general control system, etc., can solve problems such as actuator or sensor failure, global task failure, economic loss, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be further explained below in conjunction with the accompanying drawings.
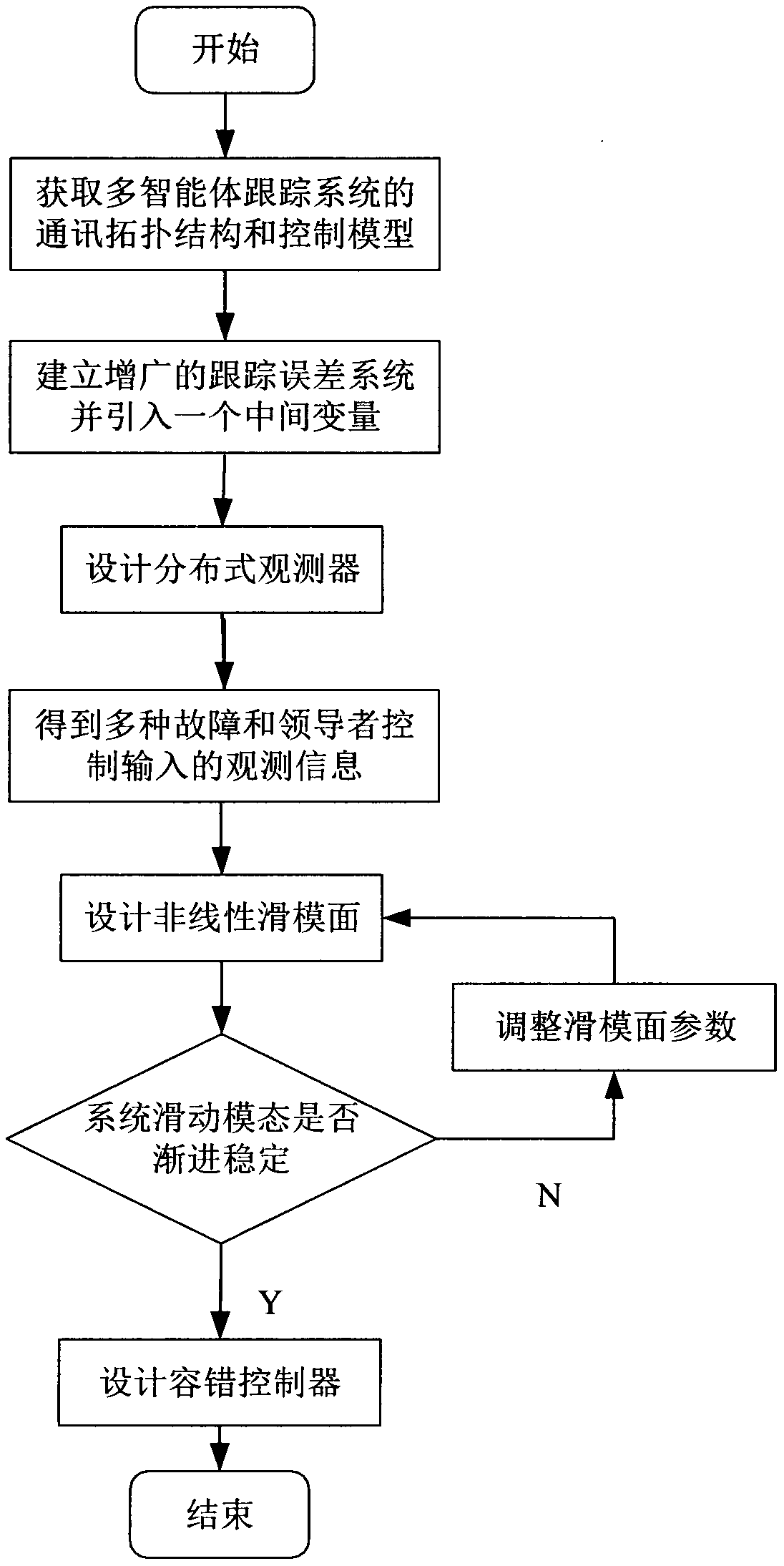
[0068] Such as figure 1 As shown, considering the actuator and sensor faults and inherent nonlinear problems of a linear multi-agent system, a distributed observer is designed according to the neighbor set output information of the agent, and based on the obtained fault and leader unknown control input information, a Nonlinear Sliding Mode Surfaces and Sliding Mode Fault Tolerant Controllers. Specific steps are as follows:
[0069] Step 1) Obtain the control model, fault model and communication topology of the multi-agent tracking system:
[0070] Step 1.1) The leader control model is shown in formula (1):
[0071]
[0072] where x 0 (t)∈R n and y 0 (t)∈R p Represent the state quantity and output quantity of the leader agent system respectively, r 0 (t)∈R m denotes the control input of the leader system, and r 0 (t)≠0;
[0073] Step 1.2) The follower cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More