

Robot system used for wall face environment perception
A robot system and environment perception technology, applied in the field of wall environment perception robot system, can solve the problems of high risk, uncertain operation, cumbersome work, etc., and achieve a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below with reference to the accompanying drawings and in combination with embodiments.
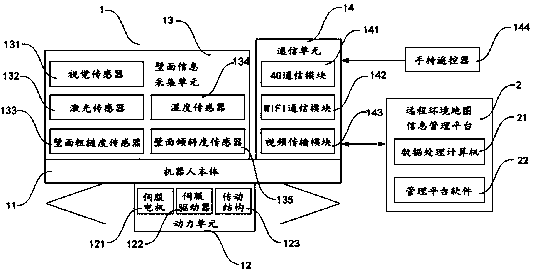
[0030] see figure 1 As shown, a robot system for wall environment perception is composed of a wall-climbing robot 1 with a wall environment perception function and a remote environment map information management platform 2 .
[0031] The wall-climbing robot 1 includes a robot body 11 , a power unit 12 , a wall information collection unit 13 and a communication unit 14 .
[0032] The power unit 12 includes a servo motor 121 , a servo driver 122 and a transmission structure 123 mounted on the robot body 11 .
[0033] The servo motor 121 is used to provide power for the robot body 11 to walk on the wall, and the servo motor 121 is integrated with a reduction mechanism inside and has an electromagnetic brake function.
[0034] The servo driver 122 has a network communication port, a CAN bus interface and a 232 serial port. The power of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More