

Joint positioning method based on RGB-D and laser speedometer
An odometer and laser technology, applied in surveying and navigation, re-radiation of electromagnetic waves, utilization of re-radiation, etc., can solve problems such as inability to work, poor relocation ability, blurred images, etc., to improve the correct matching rate and ensure accuracy The effect of rate and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the accompanying drawings.
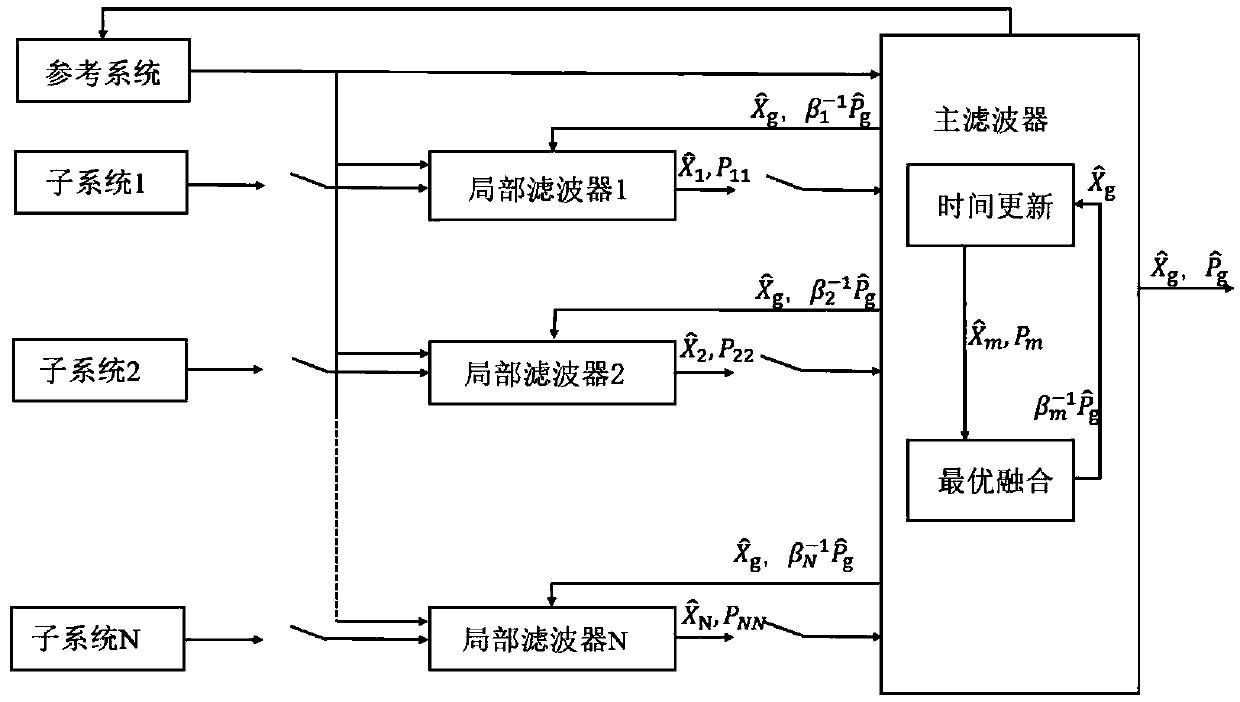
[0035] combine first figure 2 , to describe the specific process of federated filtering.
[0036] The main idea of federated filtering is that each local filter uses the information provided by the local sensor to operate independently, and the obtained local estimated value and covariance are sent to the global filter, and the global optimal estimate is obtained through the calculation of the global filter. Then, the global optimal estimate is fed back to the local filter, and the estimated value of the local filter is reset for the next update fusion.
[0037] Suppose the motion equation and observation equation of the robot are respectively
[0038] x i (k)=F(k-1)X i (k-1)+W(k) (1)
[0039] Z i (k)=H i (k-1)X i (k)+V i (k) (2)
[0040] where X i (k) is the state vector at time k, F(k-1) and H i (k-1) are state transition matrix and observati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More