

Method and system for detecting obstacle movement direction based on laser radar
A technology of lidar and movement direction, applied in radio wave measurement system, measurement device, electromagnetic wave re-radiation and other directions, can solve the problems of slow processing, large amount of calculation data, inability to detect the type of obstacles and the direction of movement of obstacles, etc. Achieving a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0067] This embodiment provides a method for detecting the moving direction of obstacles based on laser radar, such as Figure 1 to Figure 4 As shown, the method includes the steps of:
[0068] A method for detecting the direction of movement of obstacles based on laser radar, comprising steps:
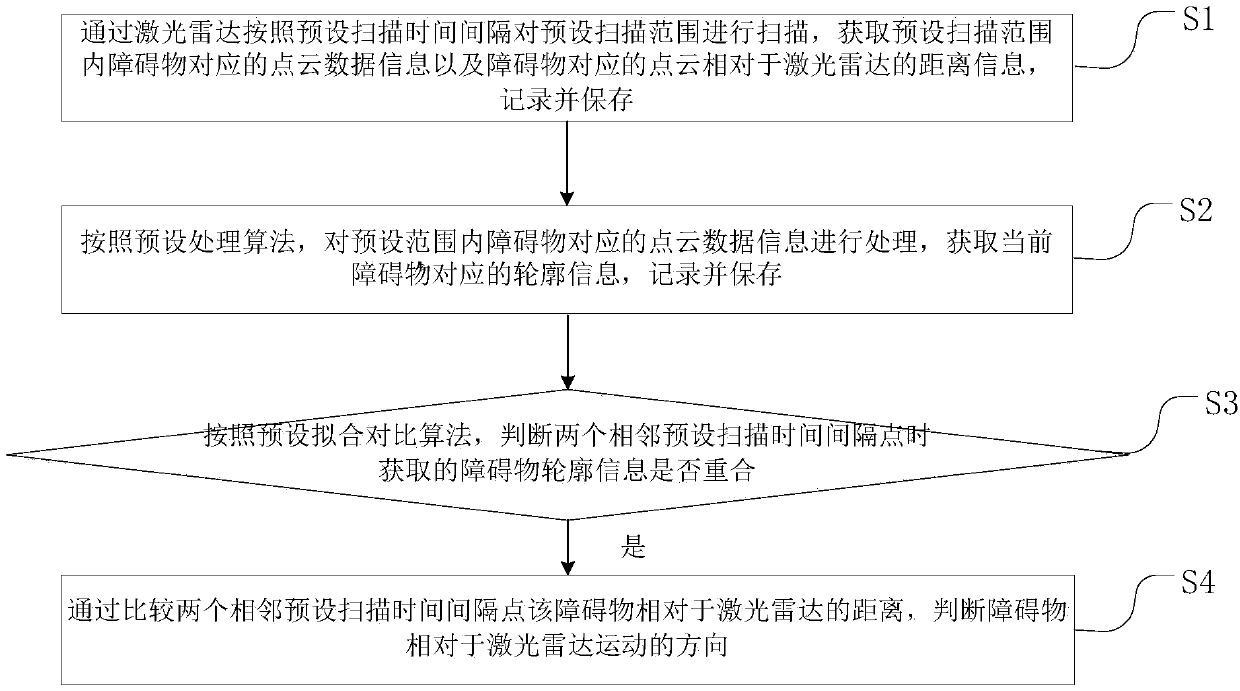
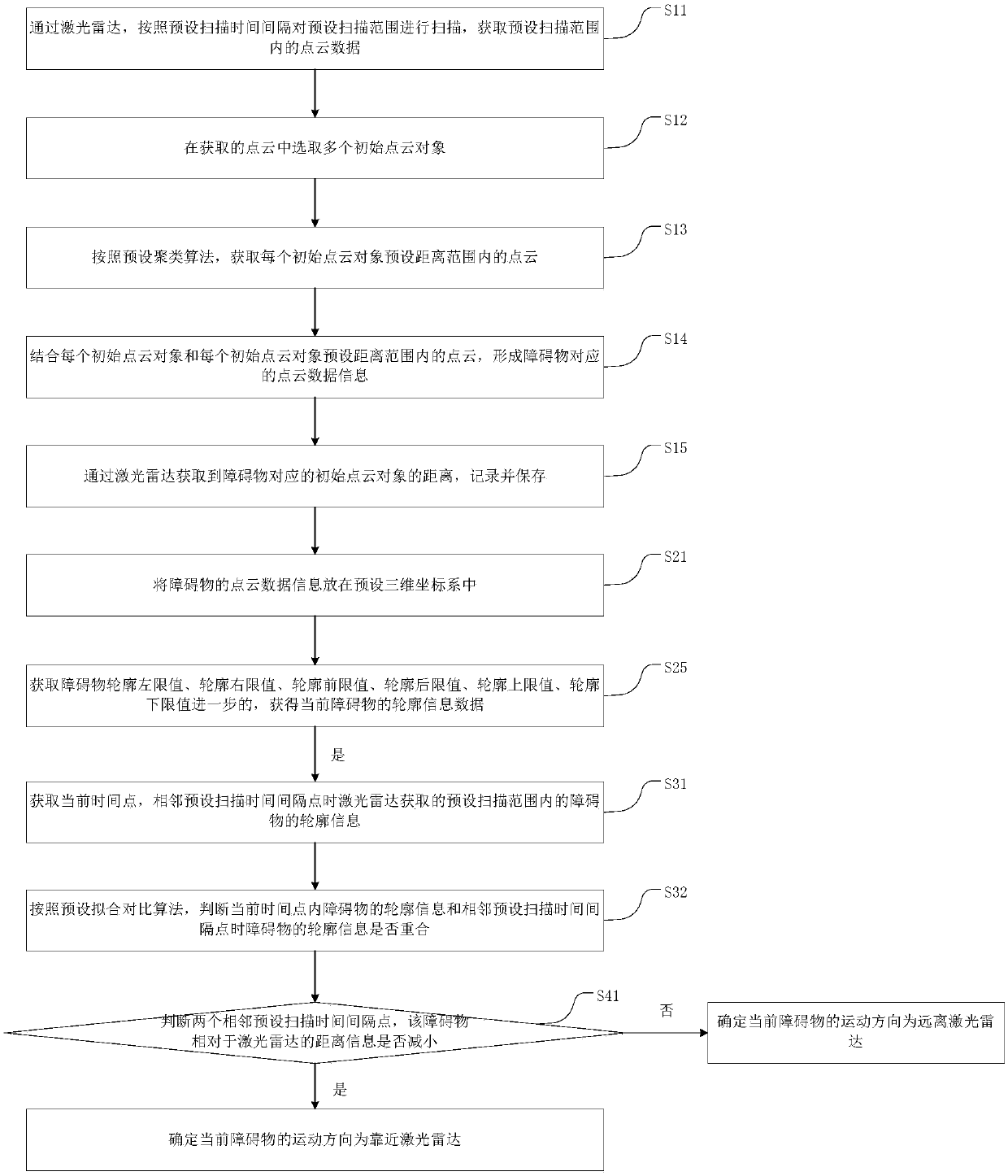
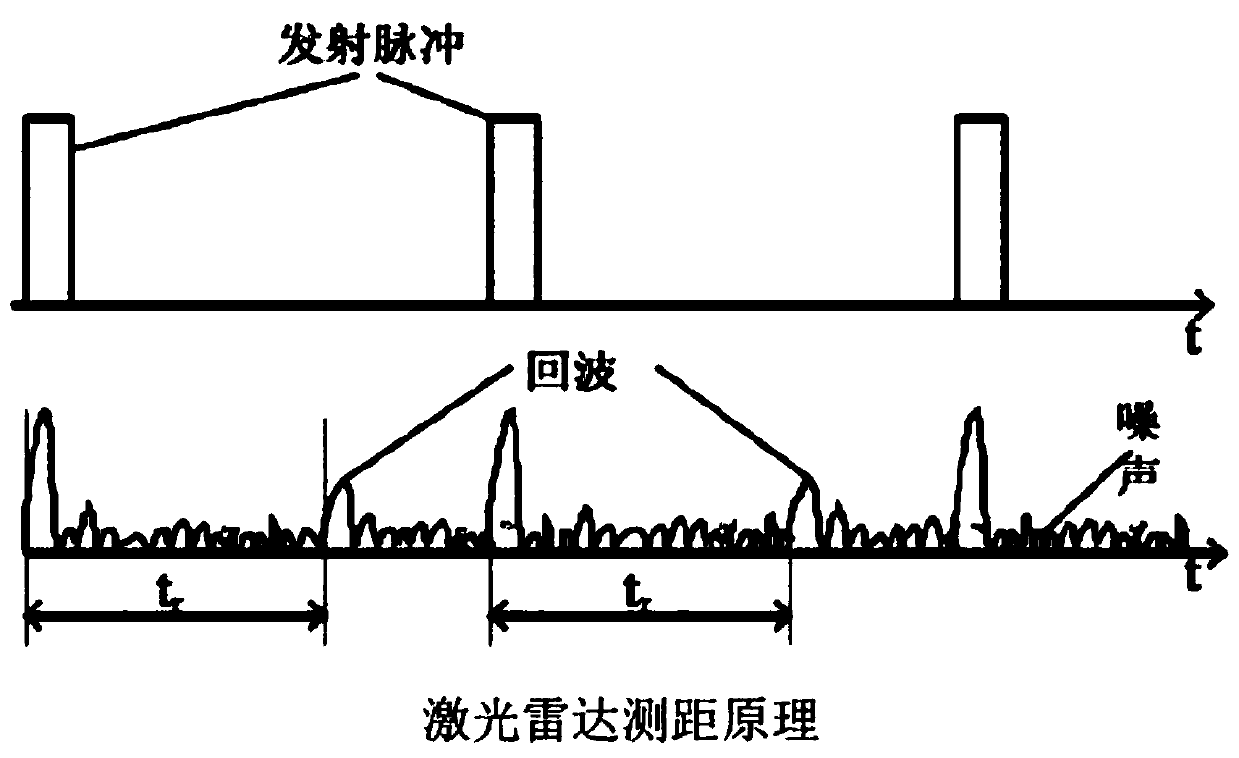
[0069] S1: Use the laser radar to scan the preset scanning range according to the preset scanning time interval, obtain the point cloud data information corresponding to the obstacle in the preset scanning range and the distance information of the point cloud corresponding to the obstacle relative to the laser radar, record and save;
[0070] S2: According to the preset processing algorithm, process the point cloud data information corresponding to the obstacle within the preset range, obtain the contour information corresponding to the current obstacle, record and save it;
[0071] S3: According to the preset fitting comparison algorithm, it is judged whether the obstacle contour i...
Embodiment 2
[0100] This embodiment provides a system for detecting the direction of movement of obstacles based on laser radar, such as Figure 5 to Figure 6 As shown, the system includes:
[0101] A system for detecting the direction of movement of obstacles based on lidar, including:
[0102] The acquisition data information module is used to scan the preset scanning range through the laser radar according to the preset scanning time interval, and obtain the point cloud data information corresponding to the obstacle in the preset scanning range and the point cloud corresponding to the obstacle relative to the laser radar. Distance information, record and save;
[0103] The calculation contour information module is used to process the point cloud data information corresponding to the obstacle within the preset range according to the preset processing algorithm, obtain the contour information corresponding to the current obstacle, record and save it;
[0104] The contour coincidence com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More