

Intelligent restaurant service robot
A technology of service robots and robots, which is applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of the limited range of action of food delivery robots, no autonomous obstacle avoidance function, and high laying costs, so as to improve system reliability and Usability, increased practicality and stability, prevents food from spilling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments:
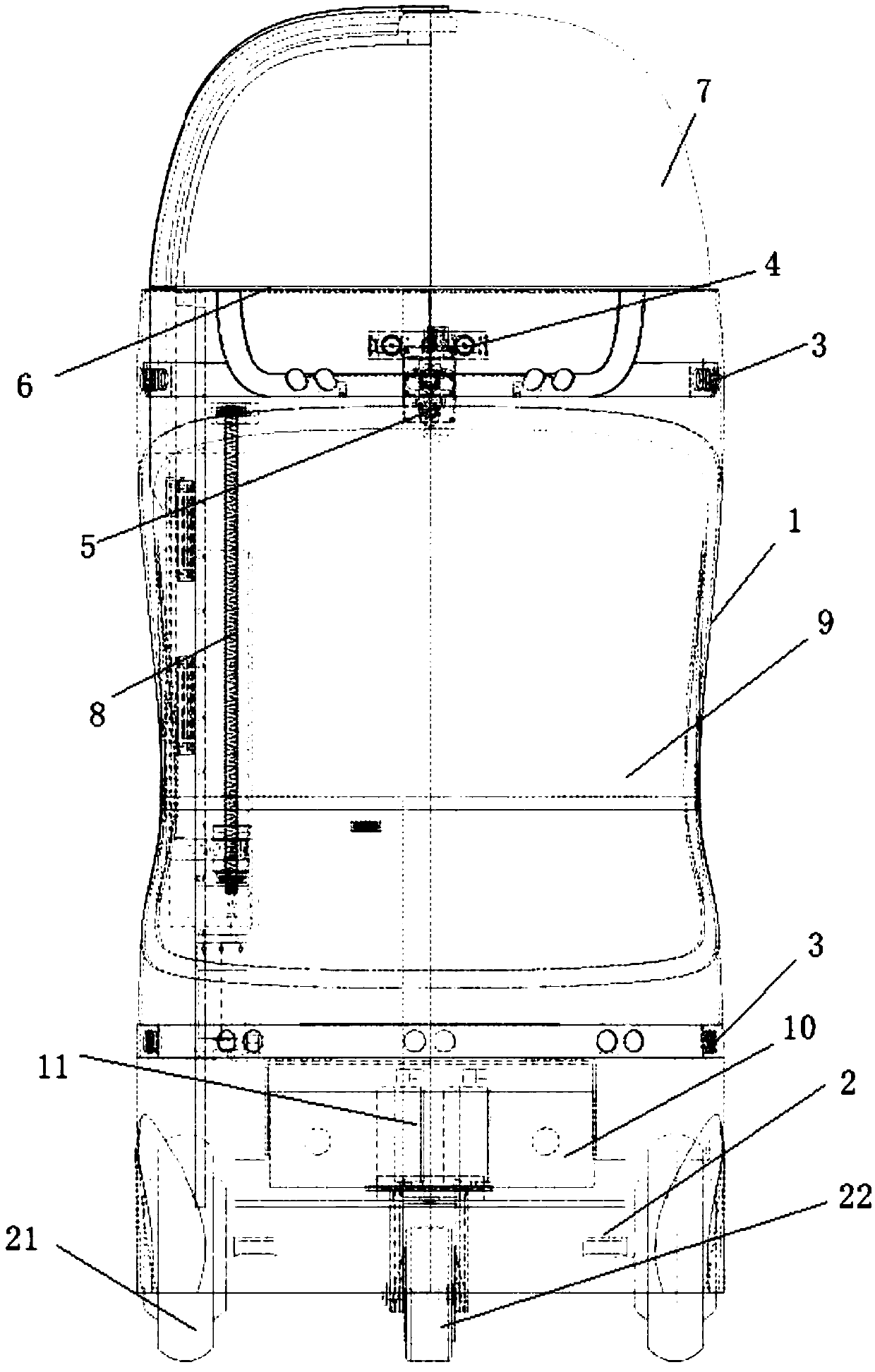
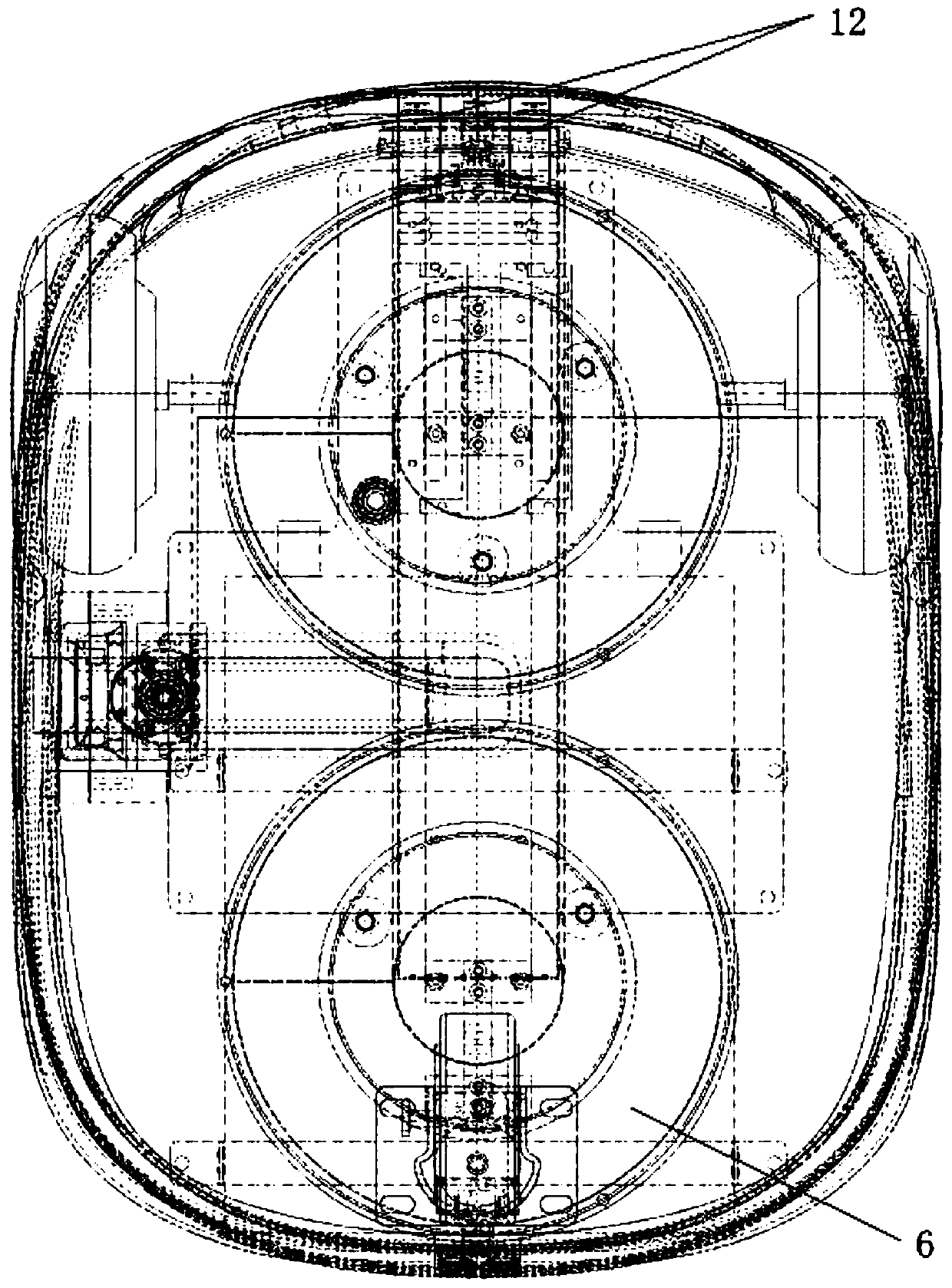
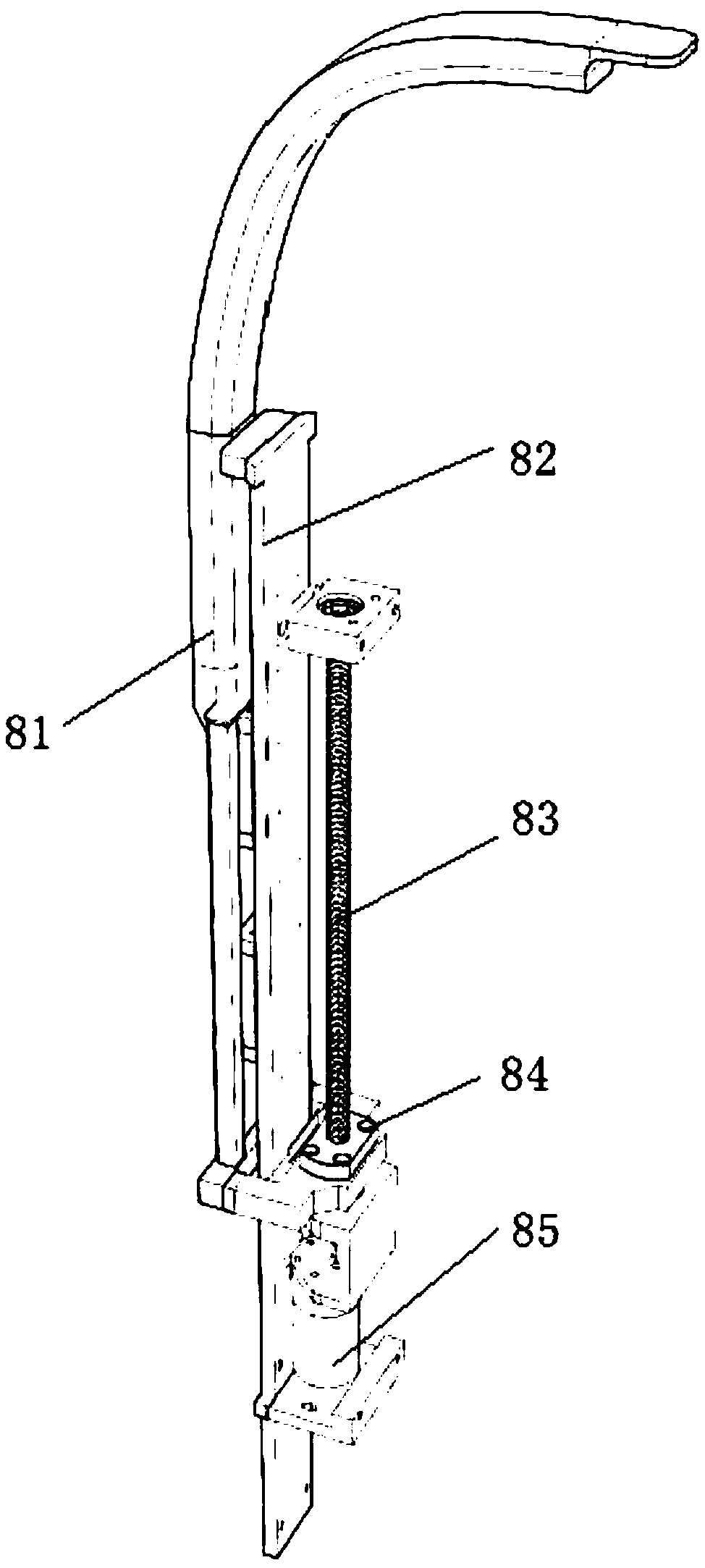
[0034] like Figure 1-3 As shown, a kind of intelligent restaurant service robot has a shell 1, and the bottom of the shell 1 is a movable chassis 2, and the movable chassis 2 is provided with a driving wheel 21 and a driven wheel 22, wherein two wheels are driving wheels 21, The others are driven wheels 22; the driving wheel 21 is driven by a motor, and the driven wheel 22 is a universal wheel; the camera 5 and the 3D visual imaging sensor 4 are arranged at the front and back of the housing 1; the upper and lower layers of ultrasonic sensors are arranged around the housing 1 3. Used for distance measurement and obstacle avoidance; the top of the housing 1 is provided with a food tray 6, and the upper part of the food tray 6 is provided with a cover 7 that can move up and down; one side of the middle part of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More