

Hybrid electric vehicle self-adaptive PID dynamic control method for improving grey prediction
A hybrid electric vehicle, gray prediction technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve the problem of insufficient dynamic response ability of HEV power system driving ability, difficult to achieve HEV control strategy optimization goals, HEV control strategy The energy consumption optimization target becomes worse and other problems, so as to achieve the effect of improving the dynamic control effect, reducing the overshoot and accelerating the adjustment process, and improving the speed response.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
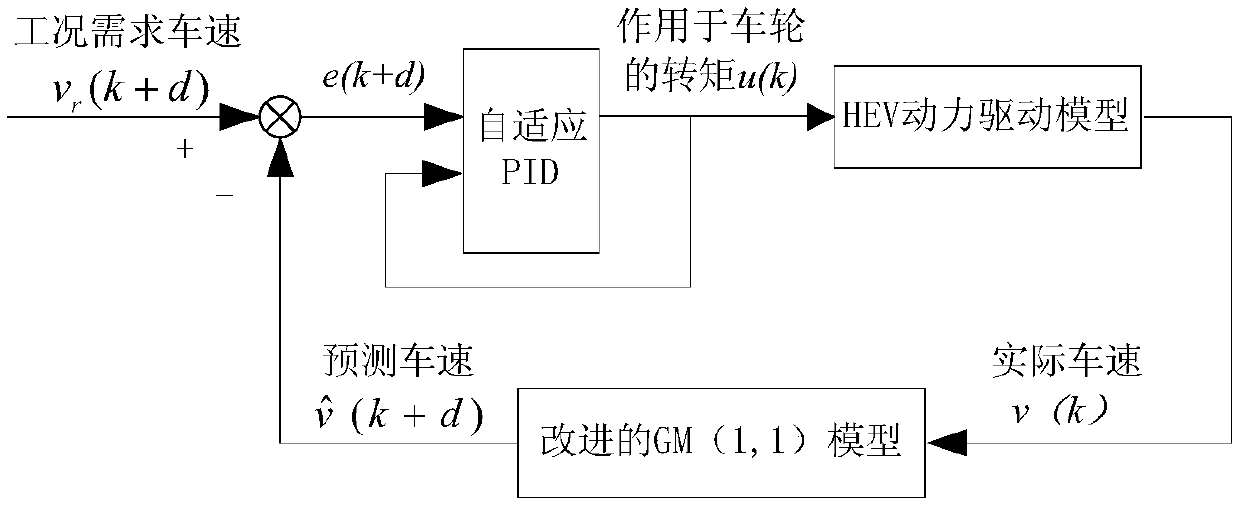
[0053] Such as figure 1 shown. The present invention is an adaptive PID dynamic control method for HEV power system with improved gray prediction. The method combines gray prediction with adaptive PID control, and introduces the quadratic performance index into the setting process of the PID controller. The weighting coefficient Automatically adjustable, realizing the optimal control law of adaptive PID. Use the historical vehicle speed data output by the HEV power drive model to predict the vehicle speed in the next few steps, and use the predicted vehicle speed as a feedback signal to compare with the working condition set value to obtain a deviation, which is used as the input of the adaptive PID controller. Therefore, the delayed controlled ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More