

Neural network and active disturbance rejection composite control method for three-axis tripod head servo motor
An active disturbance rejection controller and neural network technology, applied in the direction of DC motor speed/torque control, control system, control of multiple DC motors, etc., can solve the difficulty of PID control to achieve high-precision control, and the strong friction of the servo motor of the pan/tilt And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
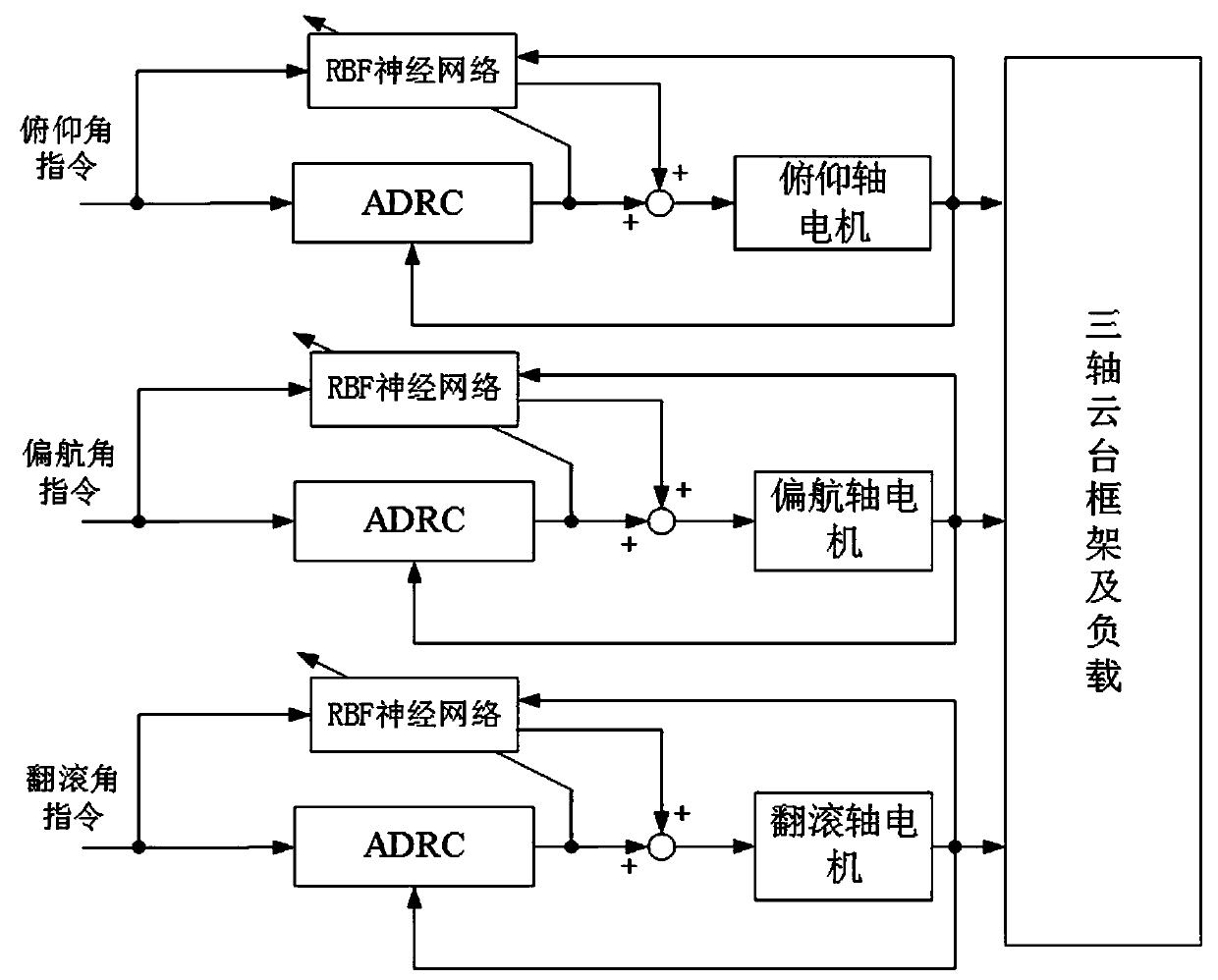
[0062] The principle block diagram of the three-axis pan-tilt control strategy in this embodiment is as follows figure 1 As shown, the servo motors of the yaw axis, roll axis and pitch axis use DC motors as the actuators, and the output shafts of the motors are directly connected to the frame, where the pitch axis is connected to the inner frame, the roll axis is connected to the middle frame, and the yaw axis is connected to the middle frame. frame connected. The stability of the inner frame has the greatest impact on the imaging quality. In this embodiment, the control of the inner frame is taken as an example, and each axis and frame are controlled by the method of this embodiment.
[0063] A kind of compound control method of neural network and self-disturbance rejection of three-axis pan-tilt servo motor, comprising the following steps:
[0064] 1) Establish the dynamic equation of the three-axis gimbal inner frame servo system with the Stribeck friction model:
[0065]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More