

Mechanical gripper with adjustable width
A manipulator gripper and adjustable technology, applied in the field of manipulator grippers, can solve the problems of processing stagnation, low processing efficiency, and high error rate of pneumatic grippers, and achieve the effects of reducing loss, improving safety, and improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the technical solutions of the present invention are further described, but the present invention is not limited to these embodiments.
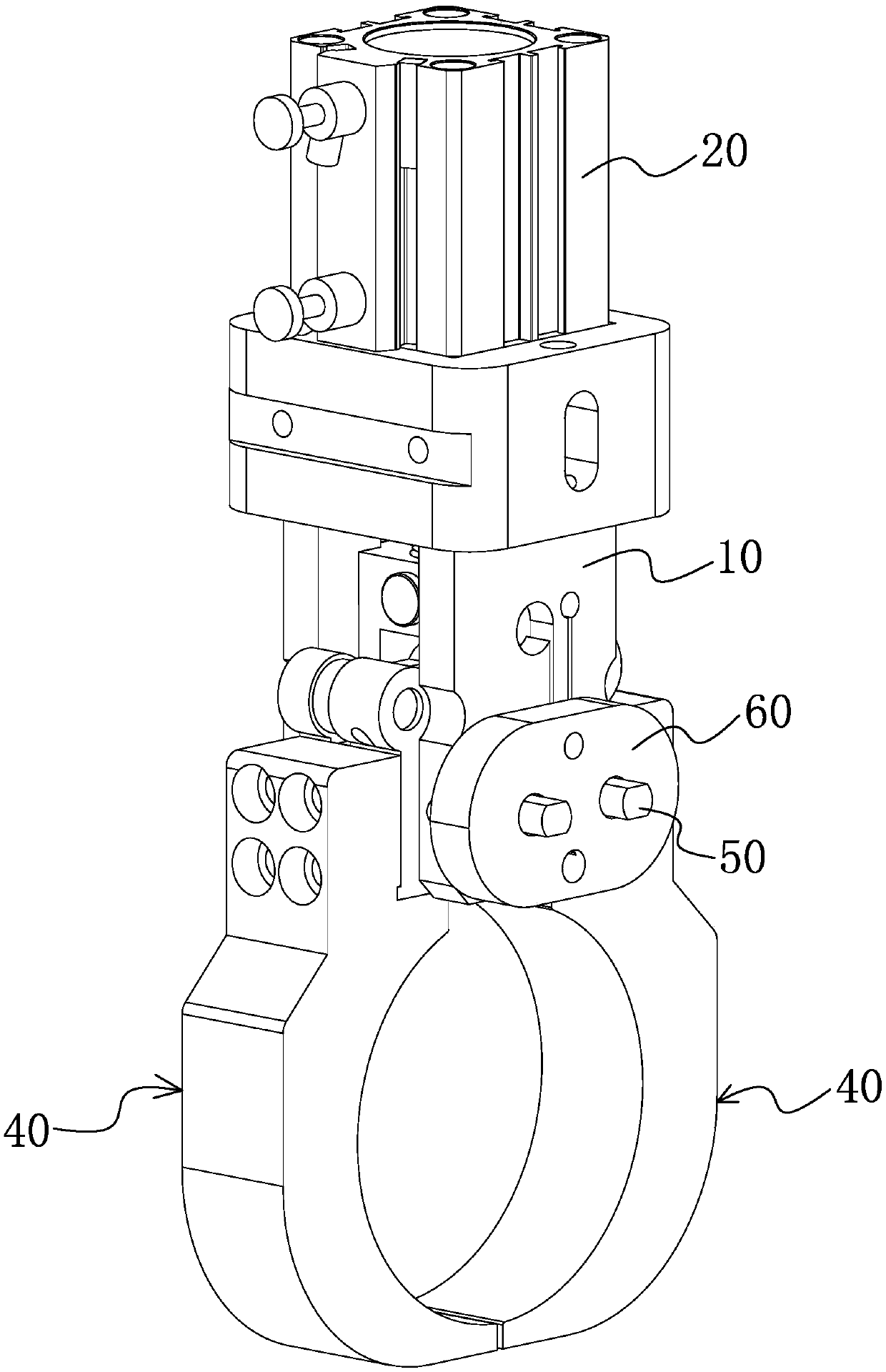
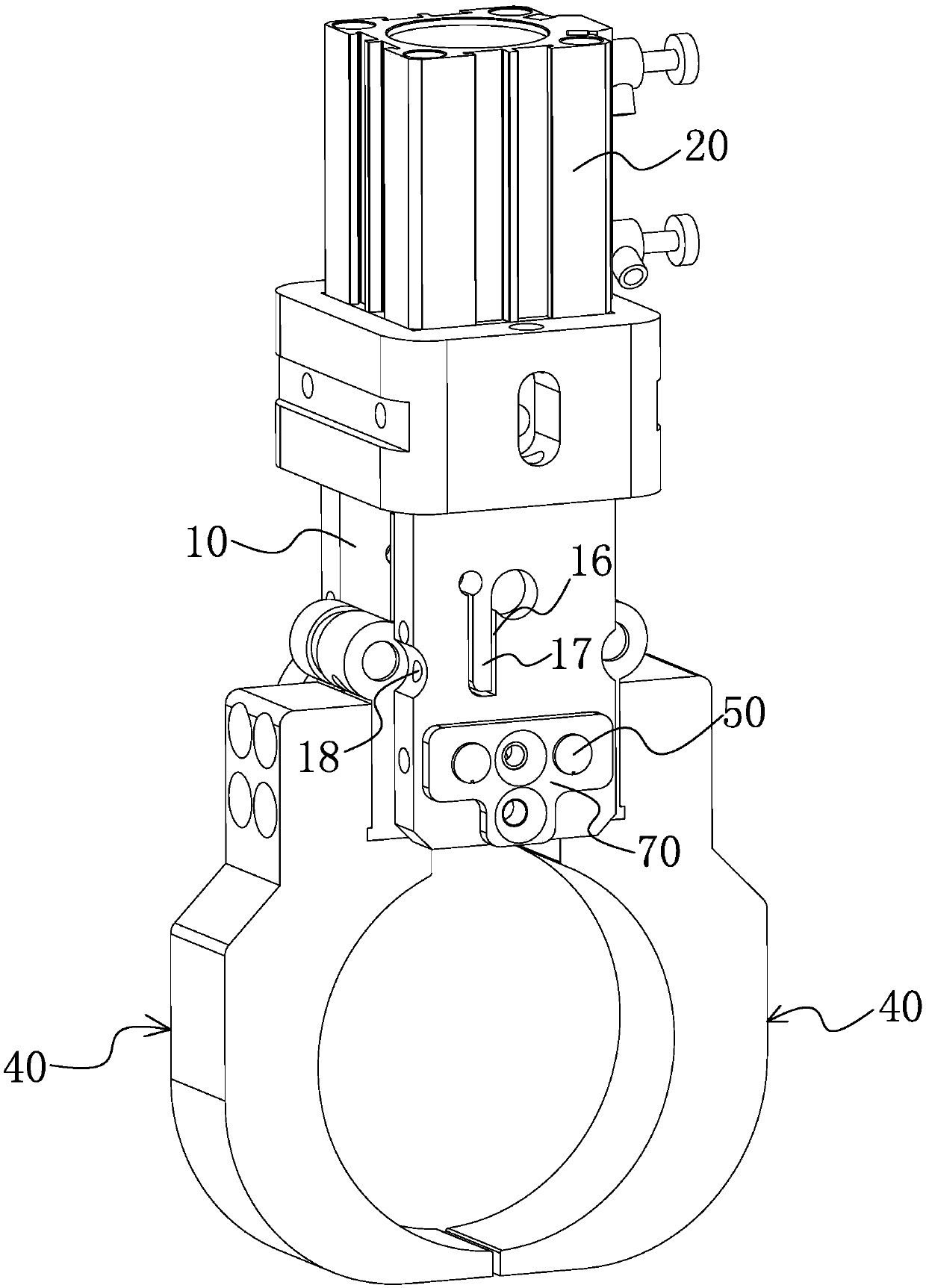
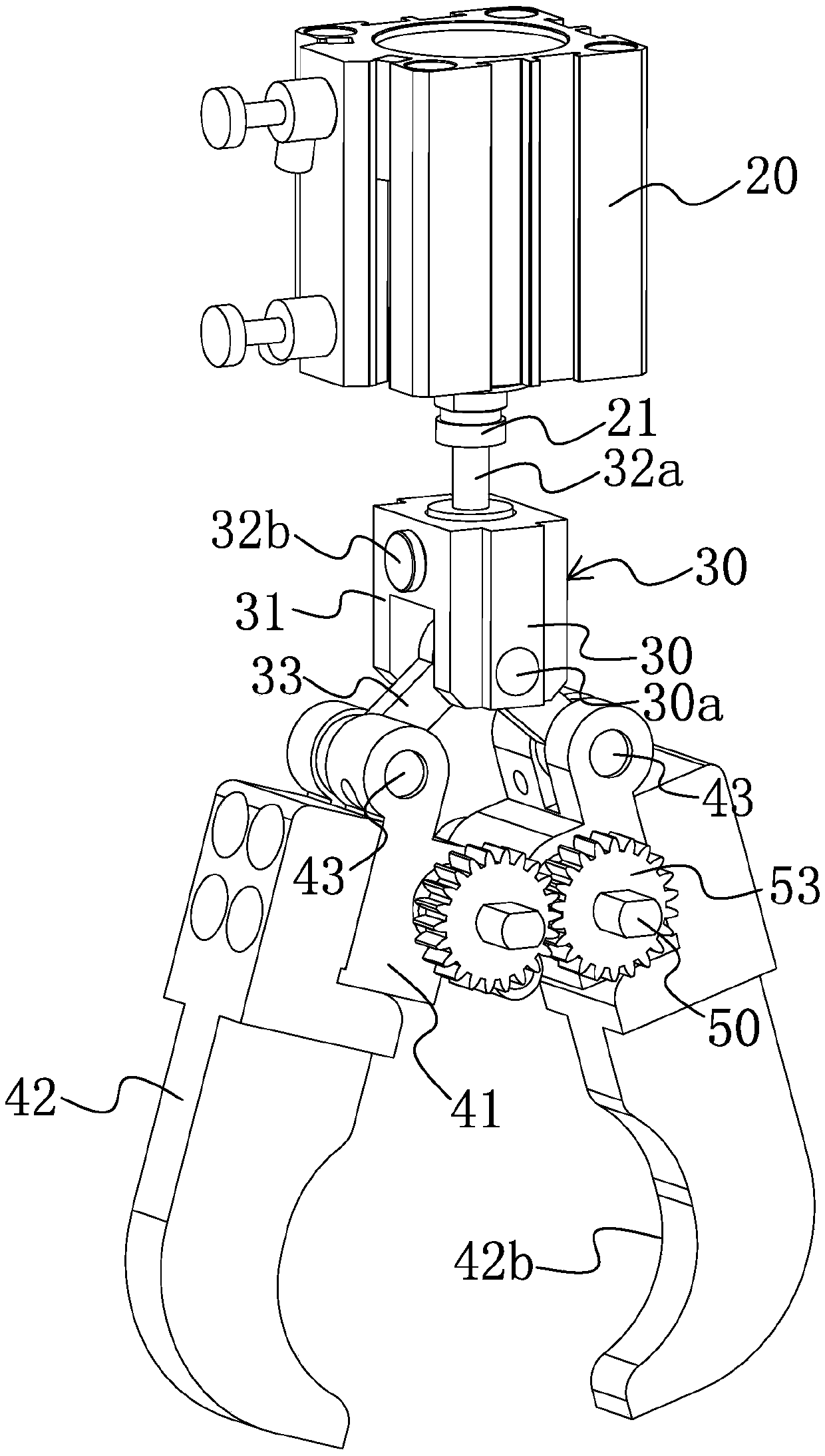
[0042] Such as Figure 1-Figure 4 As shown, a width-adjustable mechanical gripper device of the present invention includes a mounting base 10 , a driving member, a transmission member 30 , a gripper 40 and an eccentric shaft 50 .
[0043] The mounting base 10 is an inner hollow structure, and its bottom is provided with an assembly groove 11 that runs through the mounting base 10 transversely, and the driving member is fixedly connected with the top of the mounting base 10. Preferably, the driving member is a driving cylinder 20, and a piston rod 21 of the driving cylinder 20 Extending into the mounting base 10, the transmission part 30 is set in the mounting base 10 and connected with the driving part, there are two gripp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More