

Adaptive tracking control method and adaptive tracking control system for sea-surface all-drive ships
A technology of adaptive tracking and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the limitation of application effect, cannot guarantee that the tracking error signal converges to zero, and cannot give estimation of unknown parameters methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
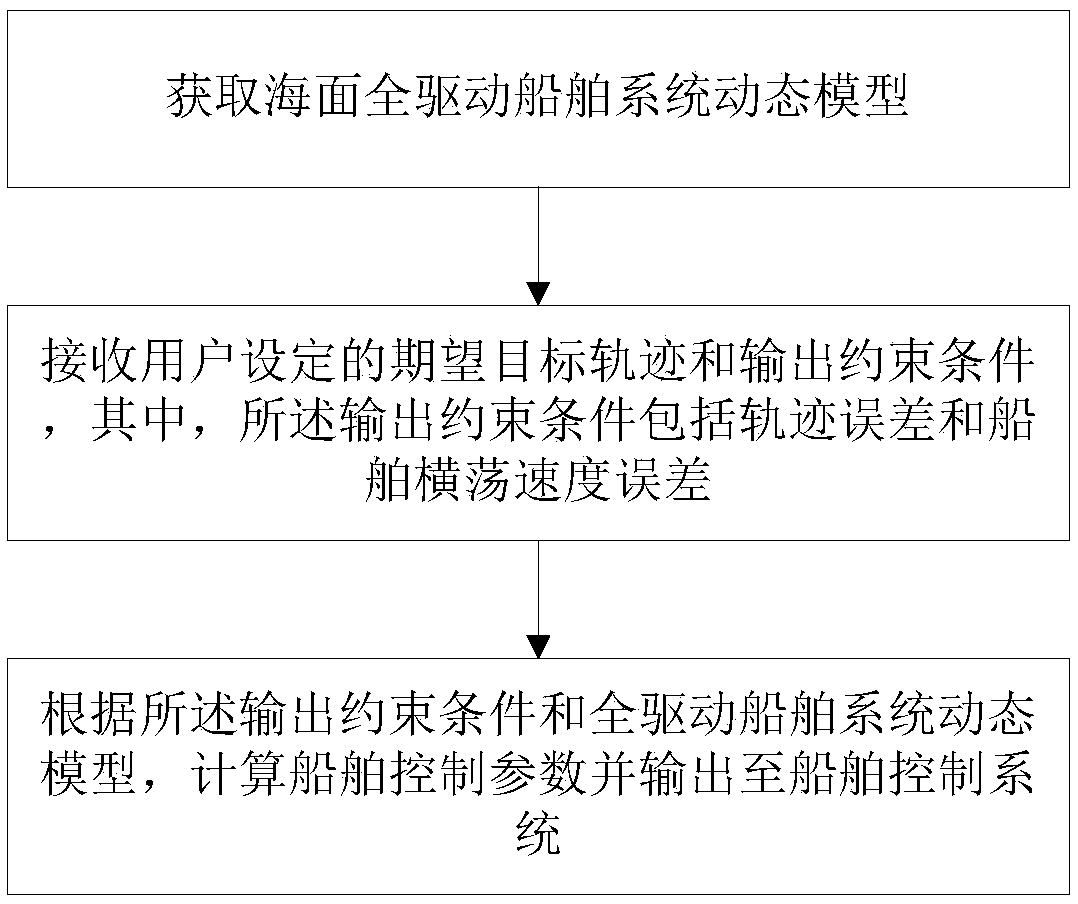
[0041]This embodiment discloses an adaptive tracking control method for a sea surface fully driven ship with output constraints, including the following steps:
[0042] Step 1: Obtain the dynamic model of the full-drive ship system on the sea;
[0043] The dynamic equation of the full-drive ship system on the sea surface is described as:
[0044]
[0045] where vector η=[η 1 , η 2 , η 3 ] T =[x,y,ψ] T , v=[v 1 ,v 2 ,v 3 ]=[u,υ,r] T , (x, y) and ψ respectively represent the position coordinates and yaw angle of the ship in the geodetic coordinate system, u, υ, r represent the longitudinal velocity, sway velocity and yaw angular velocity of the ship respectively, τ represents the control input of the system vector, M is a positive definite symmetric inertia matrix, and its specific expression is:
[0046]
[0047] The center and Coriolis moment matrix C(v) is defined as:
[0048]
[0049] in m represents the mass of the hull, x g Indicates the additional m...
Embodiment 2
[0118] The purpose of this embodiment is to provide a control system.
[0119] This embodiment provides an adaptive tracking control system for a sea surface fully driven ship with output constraints, including:
[0120] The model acquisition module acquires the dynamic model of the full-drive ship system on the sea surface;
[0121] The parameter customization module receives the desired target trajectory and output constraint conditions set by the user, wherein the output constraint conditions include trajectory error and ship sway velocity error;
[0122] The control parameter solving module calculates the control parameters of the ship and outputs them to the ship control system according to the output constraints and the dynamic model of the full-drive ship system.
Embodiment 3
[0124] The purpose of this embodiment is to provide a computer device.
[0125] This embodiment provides a computer device, including a memory, a processor, and a computer program stored on the memory and operable on the processor. When the processor executes the program, it realizes:
[0126] Obtain the dynamic model of the full-drive ship system on the sea;
[0127] receiving the desired target trajectory and output constraints set by the user, wherein the output constraints include trajectory error and ship sway velocity error;
[0128] According to the output constraints and the dynamic model of the full-drive ship system, ship control parameters are calculated and output to the ship control system.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More