

Mechanical arm control online brain-computer interface system and implementation method
A technology of a robotic arm and an implementation method, which is applied in the fields of electrotherapy, computer parts, artificial respiration, etc., can solve the problems of increasing the complexity of the user's operation, weakening the characteristics of the EEG signal, and affecting the user experience, so as to help the recovery. The effect of training, enhancing experience, and improving spatial accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
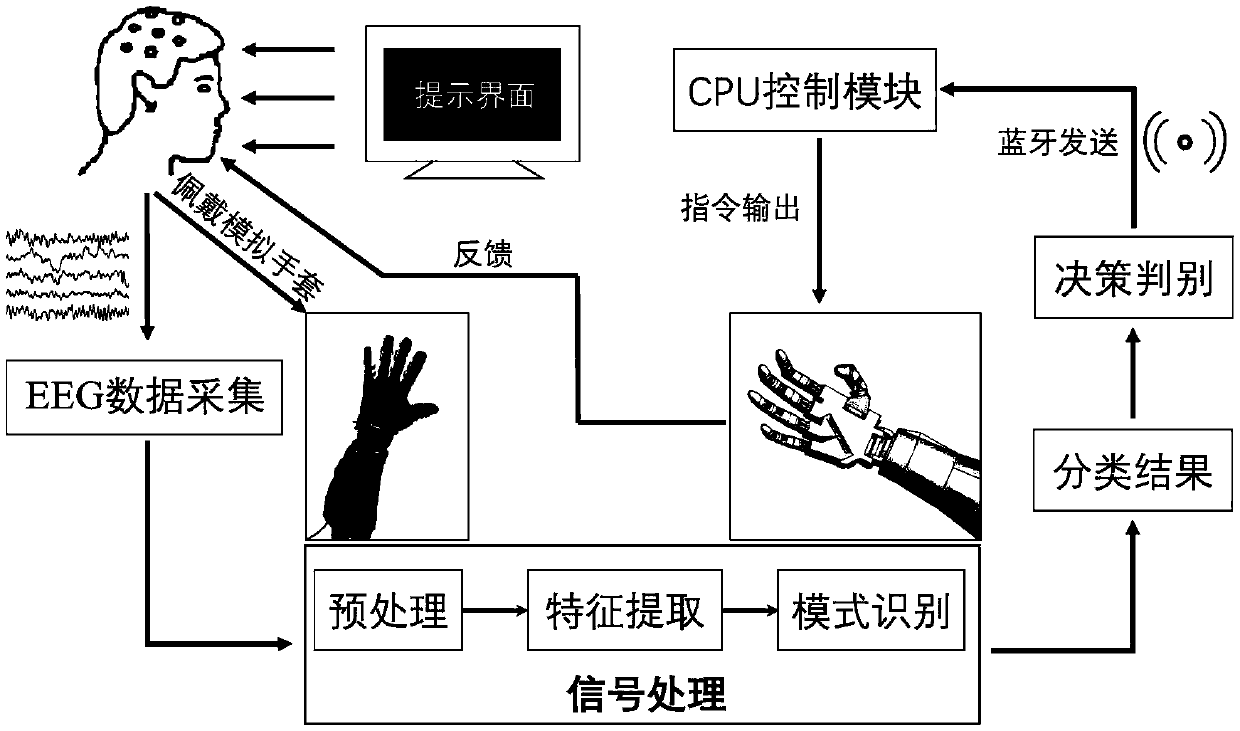
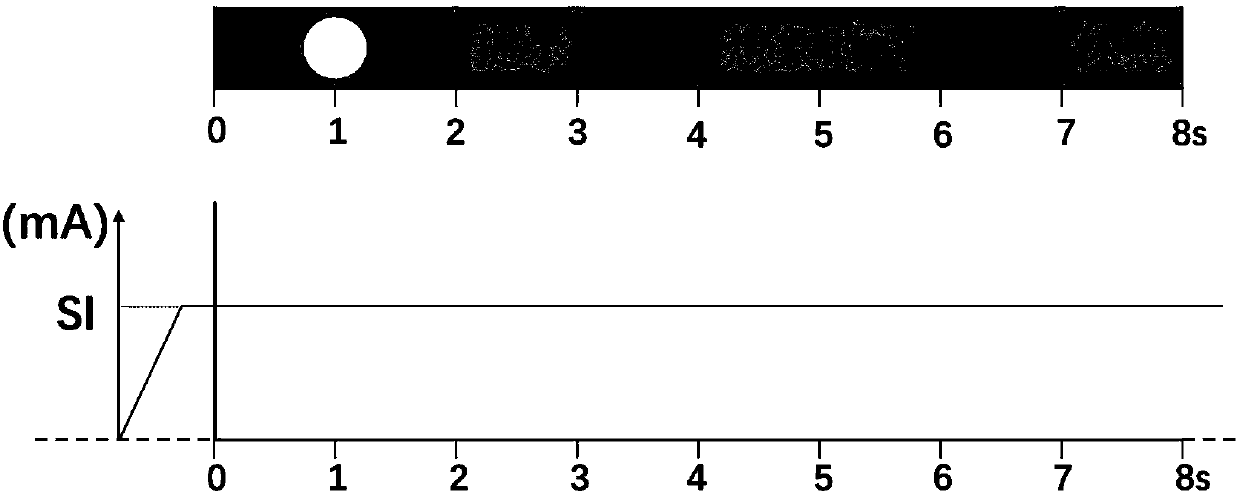
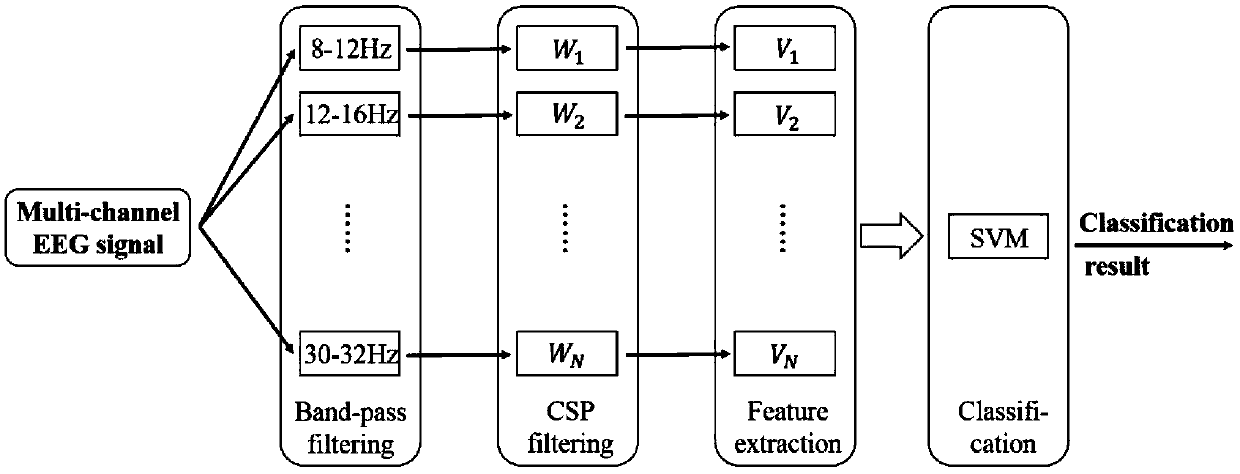
[0026] The present invention designs three types of fine imaginative movement mixed paradigms based on different fingers of the right hand, including thumb, index finger and little finger. By adding electrical stimulation, the SSSEP characteristics of the sensorimotor cortex are induced, and the recognition information of the two modalities of ERD and SSSEP can be obtained simultaneously through a single motor imagery task, and the amount of information that can be recognized by the EEG signal is increased. The glove design can increase the user's sense of touch and experience. By imagining the movements of the different fingers of the right hand, the user can control the mechanical arm to complete the specified actions and improve user interaction. This design is different from the original MI-BCI. Through the construction of an online control system for fine-motion robotic arms, the recognition of fine-motion intentions can be realized, and a new idea for rehabilitation treat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More