

Network training method, incremental mapping method, positioning method, device and equipment
A training method and network technology, applied in the field of visual positioning, can solve the problems of high hardware requirements, large amount of calculation, time-consuming, etc., to reduce the degree of dependence and solve the effect of blurred boundaries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
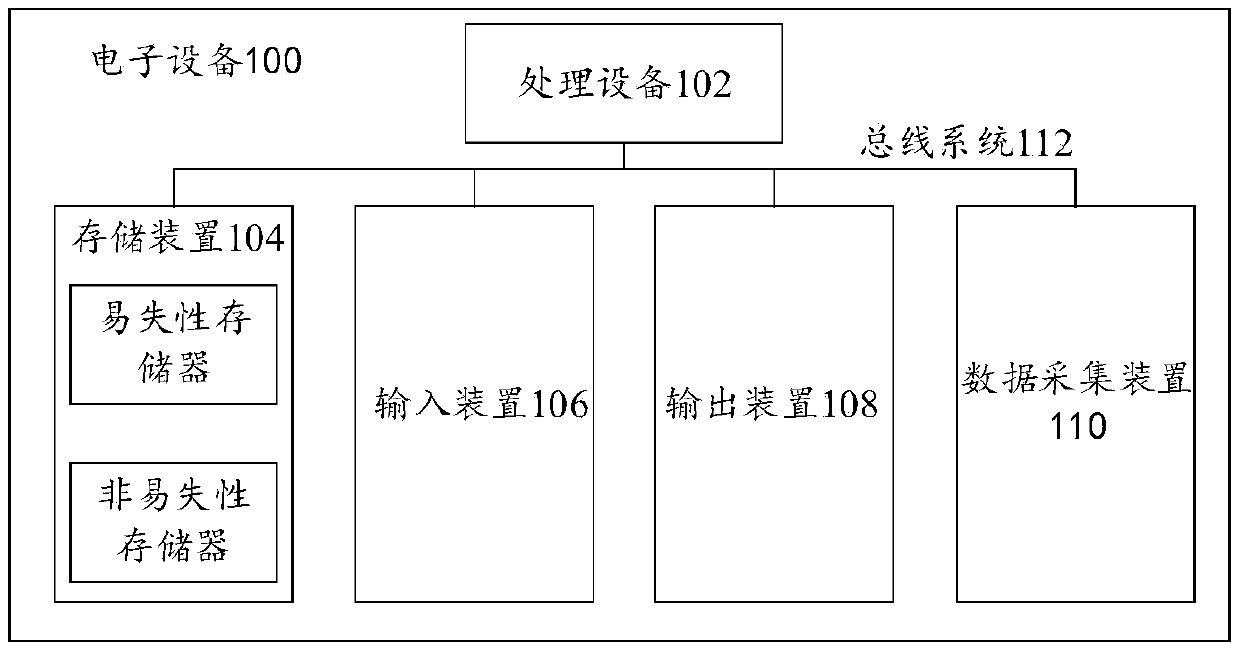
[0047] First, refer to figure 1 An example electronic device 100 for implementing the network training method, the incremental mapping method, the positioning method, the device and the device according to the embodiments of the present invention will be described.
[0048] Such as figure 1 A schematic structural diagram of an electronic device is shown, and the electronic device 100 includes one or more processing devices 102 and one or more storage devices 104 . Optionally, figure 1 The illustrated electronic device 100 may also include an input device 106, an output device 108, and a data acquisition device 110, and these components are interconnected by a bus system 112 and / or other forms of connection mechanisms (not shown). It should be noted that figure 1 The components and structure of the electronic device 100 shown are only exemplary, not limiting, and the electronic device may also have other components and structures as required.
[0049] The processing device ...
Embodiment 2
[0057] According to an embodiment of the present invention, an embodiment of a training method for a scene recognition network is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, Also, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
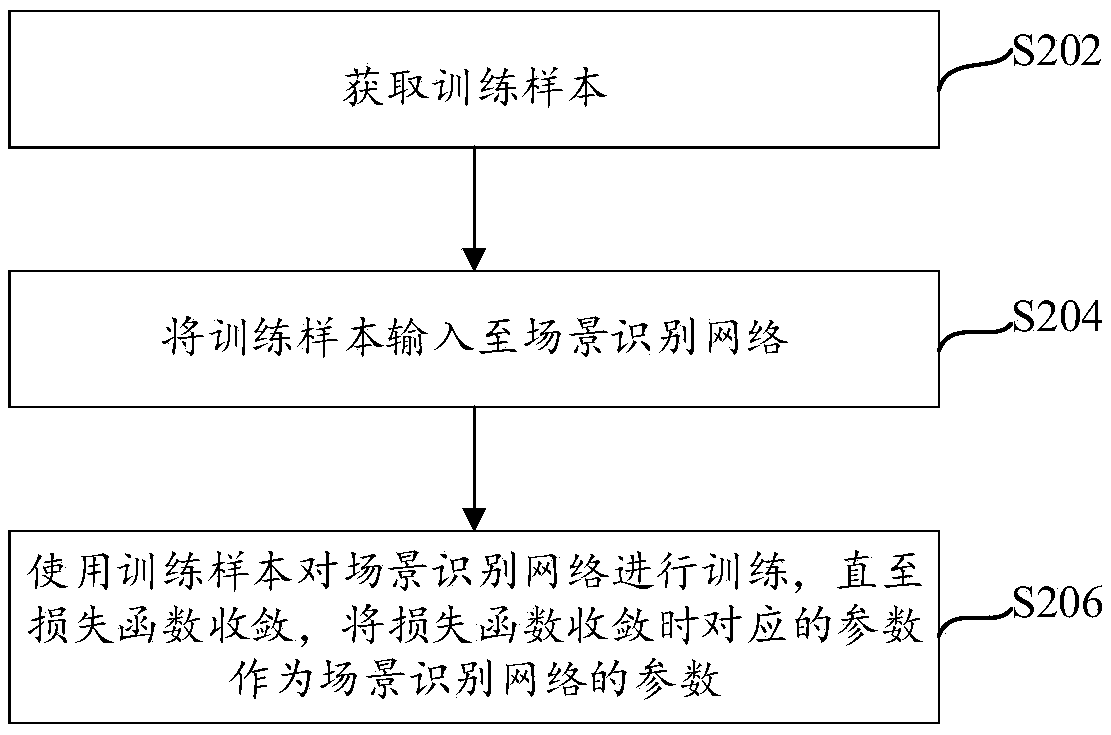
[0058] figure 2 It is a flowchart of a training method for a scene recognition network provided by an embodiment of the present invention, and the network training method is used for training a scene recognition network. The scene recognition network proposed in this embodiment is a solution for loop closure detection using deep hashing, and it can also be applied to robot relocation. The scene recognition network based on deep hashing has better stability for viewing angle changes, illumi...
Embodiment 3
[0077] Figure 4 It is a flowchart of an incremental mapping method provided by an embodiment of the present invention. The incremental mapping method is applied to a mobile terminal, and the mobile terminal stores the scene recognition obtained by the training method of the scene recognition network provided by the above embodiment. network, such as Figure 4 As shown, the method includes the following steps:
[0078] Step S402, acquiring a two-dimensional map of the target scene.
[0079] The two-dimensional map can be a map drawn in an existing way, such as a lidar map, etc. In this embodiment, the assistance of lidar positioning can be used to obtain the real pose of the mobile terminal. Lidar positioning includes but is not limited to Cartographer , GMapping, Karto, etc. It can be understood that any other method that can obtain the real pose of the camera can also replace the lidar positioning here.
[0080] Step S404, when the real pose of the mobile terminal is acq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More