

Vehicle stability control system based on active intervention steering system
A stability control and steering system technology, applied in the direction of control devices, vehicle components, driver input parameters, etc., can solve the problems of limited intervention range, yaw effect cannot be completely eliminated, and limited degree of rear wheel intervention. To achieve the effect of ensuring vehicle stability and strengthening the stability control function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Introduced below are some of the various embodiments of the invention, intended to provide a basic understanding of the invention. It is not intended to identify key or critical elements of the invention or to delineate the scope of protection.
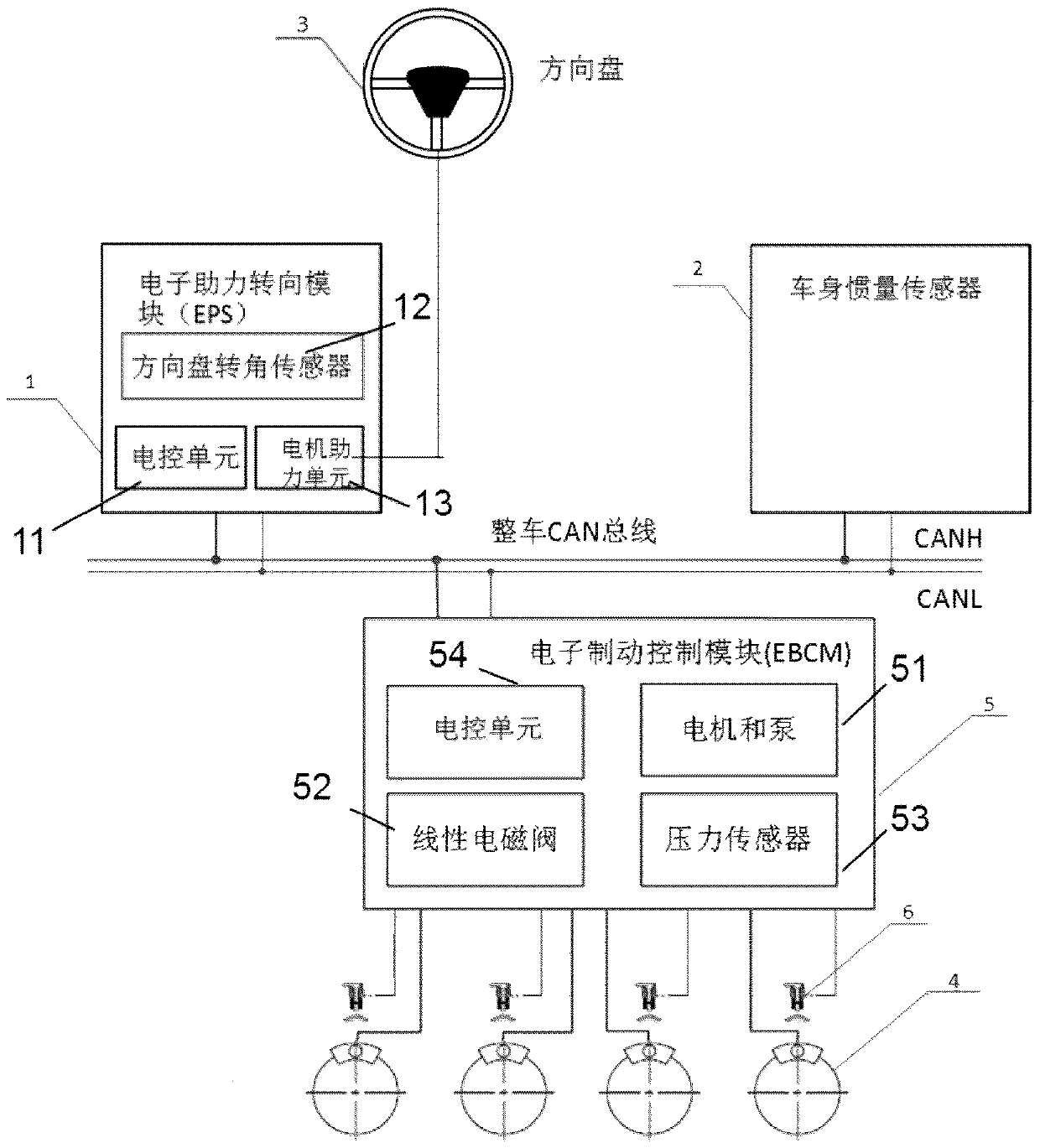
[0056] figure 1 It is a whole vehicle structure diagram of the stability control system that actively intervenes in the torque steering steering wheel operation of the steering system according to the present invention.
[0057] Refer below figure 1 , to illustrate the vehicle stability control system of the present invention that actively intervenes in the torque vectoring steering wheel operation of the steering system.
[0058] The vehicle stability control system of the present invention mainly includes: electronic power steering control module (EPS) 1 , vehicle body inertia sensor 2 , steering wheel 3 , brake wheel cylinder 4 , electronic brake control module (EBCM) 5 and wheel speed sensor 6 .
[0059] The electronic p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More