Unmanned aerial vehicle landing obstacle avoidance method and device, and unmanned aerial vehicle
A drone and obstacle avoidance technology, applied in the field of drones, can solve problems such as inability to dodge in dangerous areas, drone crashes, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
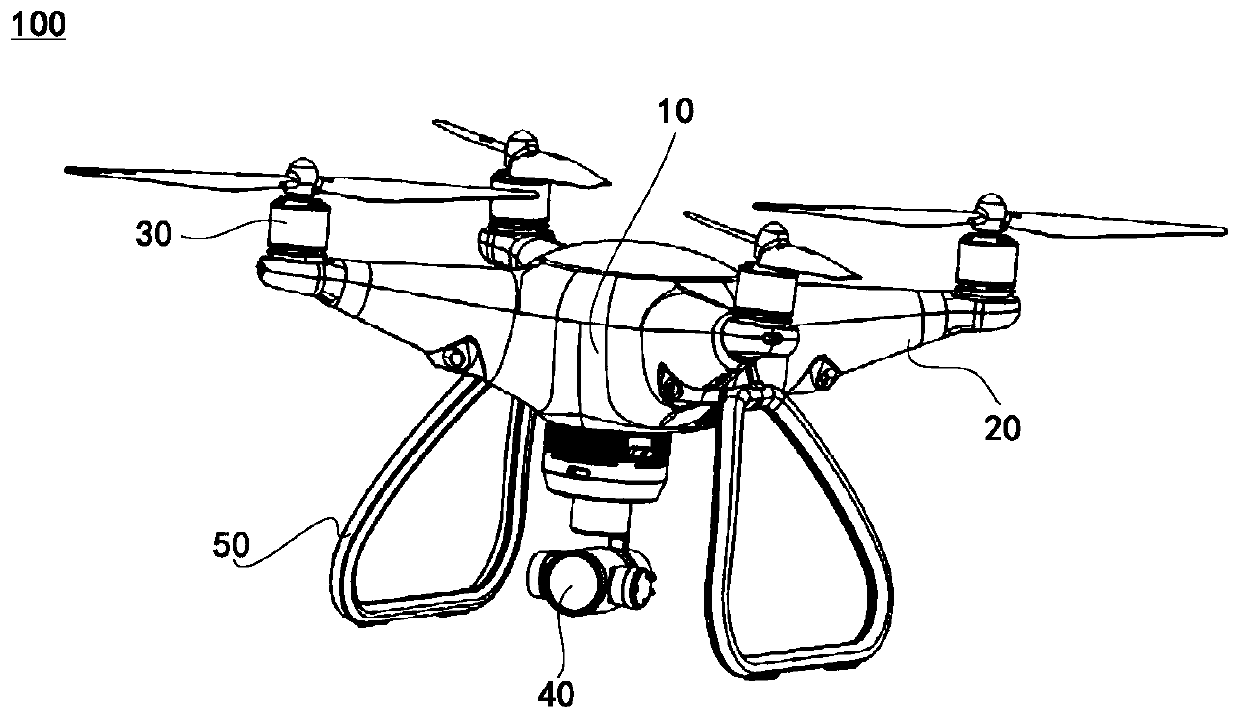
[0111] see figure 1 , is an unmanned aerial vehicle 100 provided by one embodiment of the present invention, including a fuselage 10, an arm 20, a power unit 30, a depth sensor 40, a landing gear 50, and a flight control system (not shown). The arm 20 , the depth sensor 40 and the landing gear 50 are all connected to the fuselage 10 , the flight control system is arranged in the fuselage 10 , and the power unit 30 is arranged on the arm 20 . Among them, the power unit 30, the depth sensor 40 and the landing gear 50 are all connected to the flight control system in communication, so that the flight control system can control the flight of the UAV 100 through the power unit 30, and can obtain the status of the UAV 100 through the depth sensor 40. The point cloud distribution map of the landing area can also control the contact between the landing gear 50 and the ground.
[0112] Preferably, the number of arms 20 is four, which are evenly distributed around the fuselage 10 for c...
Embodiment 2
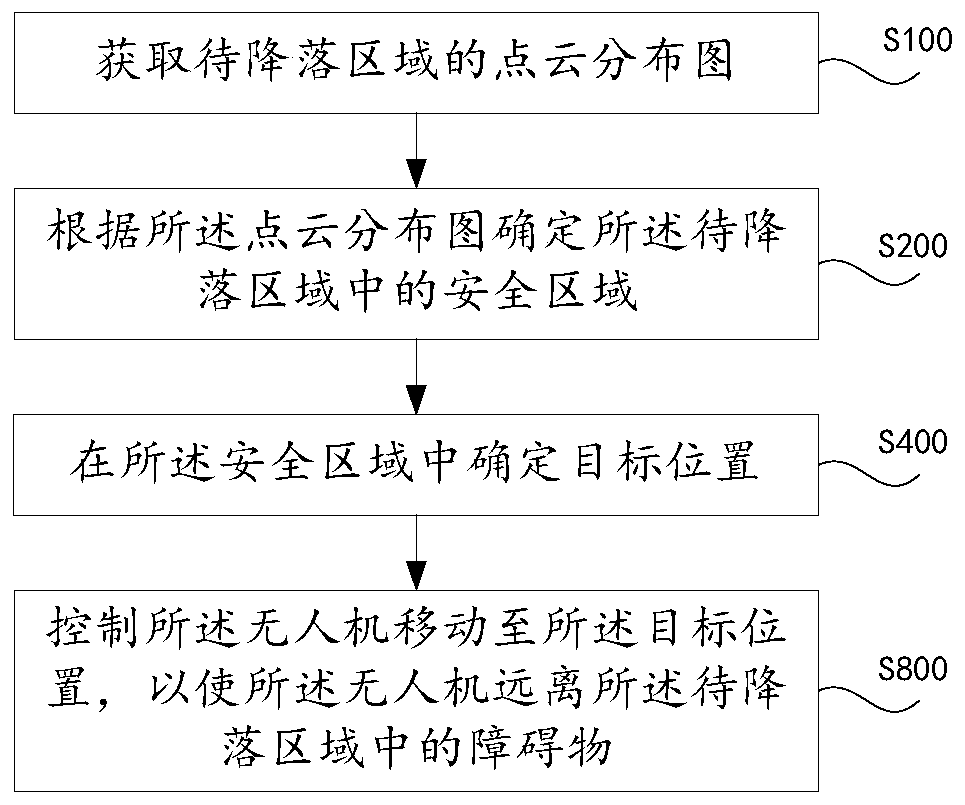
[0161] see figure 2 , is a schematic flow chart of a UAV landing and obstacle avoidance method provided by one embodiment of the present invention, which is applied to a UAV, the UAV is the UAV 100 described in the above embodiment, and the implementation of the present invention The method provided by the example is executed by the above-mentioned flight control system, and is used to avoid obstacles in the area to be landed and reduce the risk of the UAV crashing. The UAV landing obstacle avoidance method includes:
[0162] S100: Obtain a point cloud distribution map of the area to be landed.
[0163] The aforementioned "area to be landed" is an area where the drone is ready to land, and the drone is located in the center of the area to be landed.
[0164] The above "point cloud distribution map" is a schematic diagram that can reflect the distribution of point clouds in the area to be landed.
[0165] In an embodiment of the present invention, acquiring the point cloud d...
Embodiment 3
[0215] The term "module" used below is a combination of software and / or hardware that can realize a predetermined function. Although the devices described in the following embodiments can be implemented in software, implementation in hardware, or a combination of software and hardware is also conceivable.
[0216] see Figure 8, is a drone landing obstacle avoidance device provided by one of the embodiments of the present invention, the device is applied to a drone, the drone is the drone 100 described in the above embodiment, and the embodiment of the present invention The functions of each module of the provided device are performed by the above-mentioned flight control system, which is used to avoid obstacles in the area to be landed and reduce the risk of UAV crashes. The UAV landing obstacle avoidance device includes:
[0217] Obtaining module 200, described obtaining module 200 is used for obtaining the point cloud distribution diagram of area to be landed;
[0218] A ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com