Raspberry Pi-based small-scale autonomous underwater vehicle
A submersible and autonomous technology, applied to underwater ships, underwater operating equipment, ships, etc., can solve the problems of bloated and complicated electronic control system, unfavorable expansion, poor battery life, etc., and achieve easy maintenance and upgrade and function expansion , high versatility and portability, the effect of shielding hardware differences
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0044] On the contrary, the invention covers any alternatives, modifications, equivalent methods and schemes within the spirit and scope of the invention as defined by the claims. Further, in order to make the public have a better understanding of the present invention, some specific details are described in detail in the detailed description of the present invention below. The present invention can be fully understood by those skilled in the art without the description of these detailed parts.
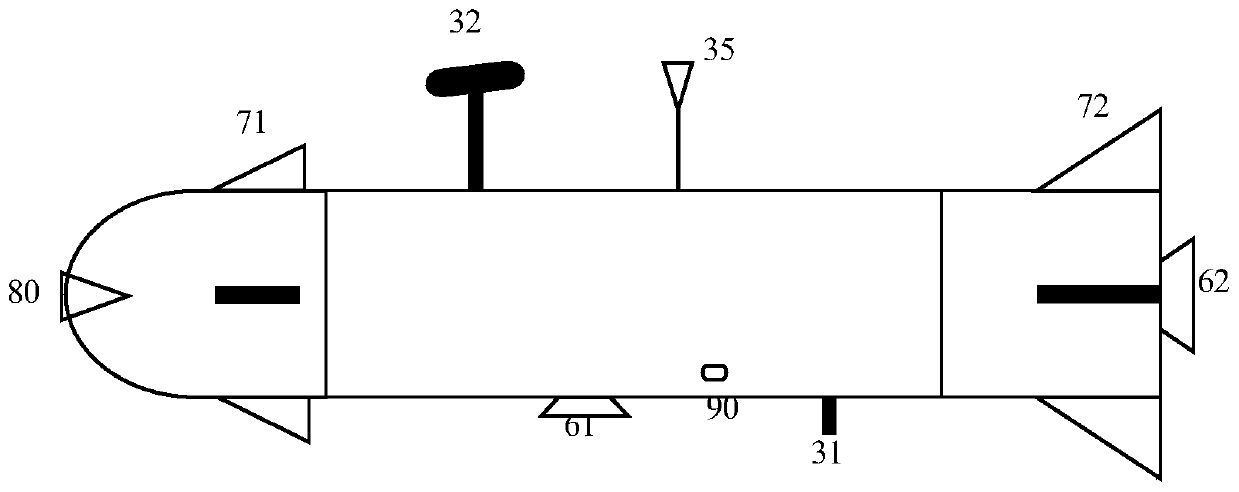
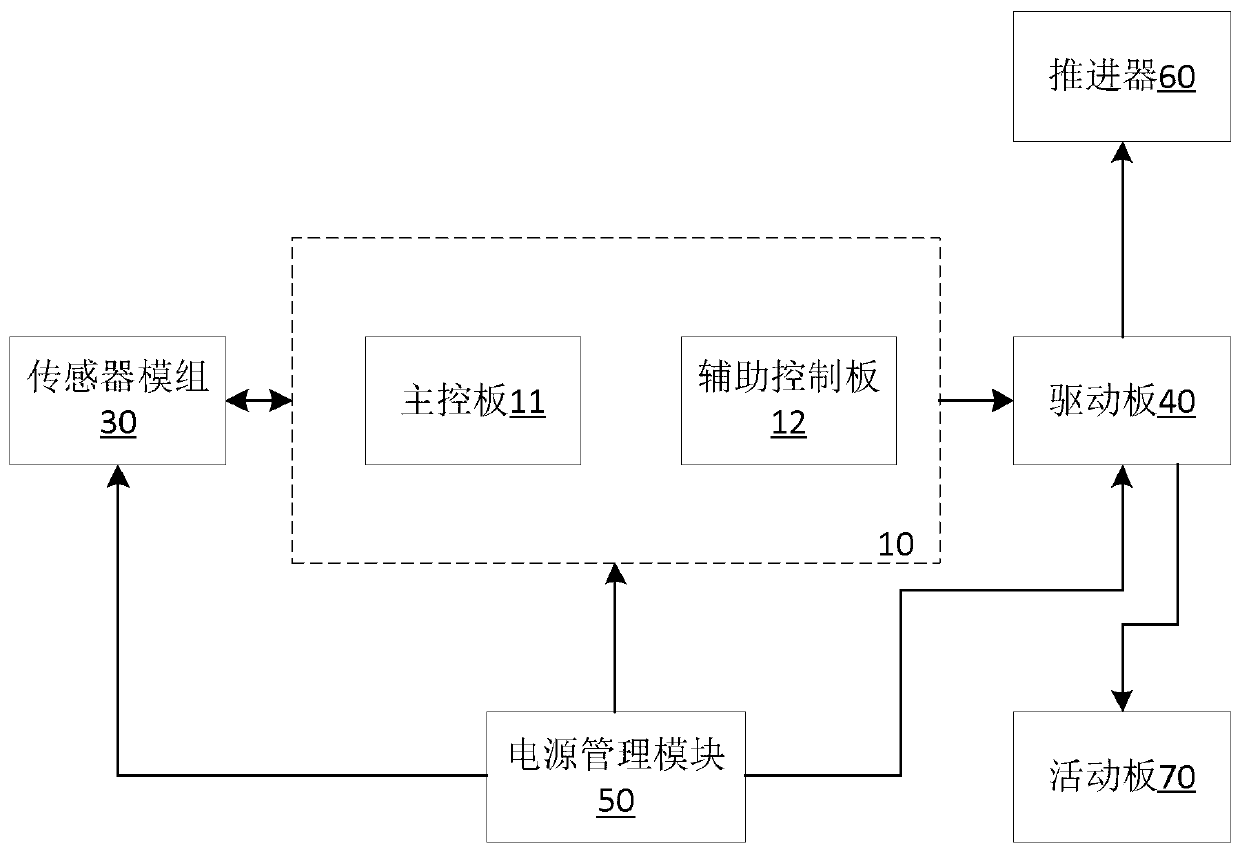
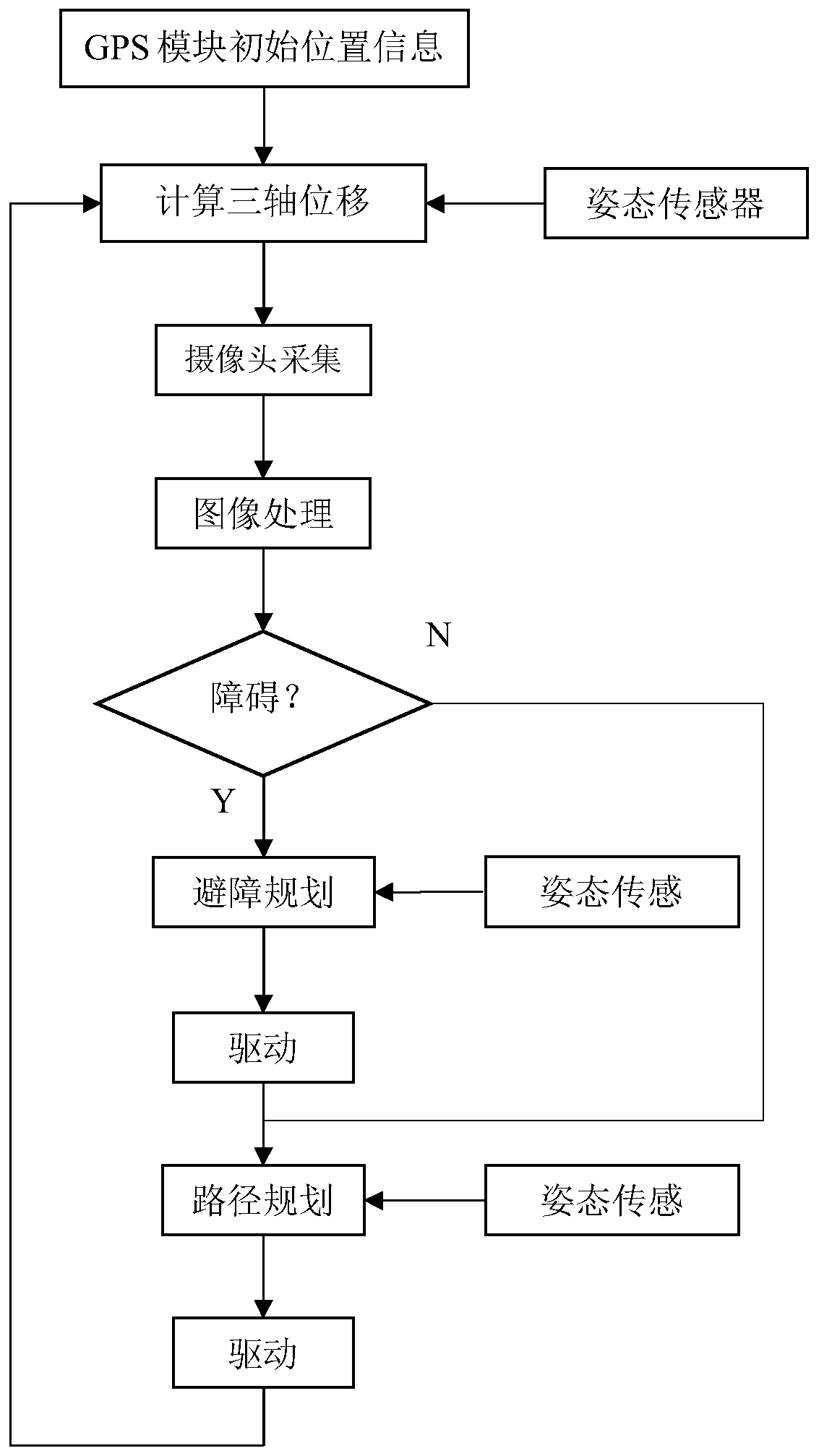
[0045] see Figure 1-5 , showing a structure diagram, a block diagram, a flow chart of navigation con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More