

A special robot for projectile handling and picking
A technology of robot and robot body, applied in the field of robots, can solve the problems of difficult operation in large-span space, limited working space, limited working radius, etc., and achieve the effect of large range of activities, solving insecurity, and increasing working range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The following is a detailed introduction to the structure and working principle of the projectile handling, picking and placing special robot provided by the present invention in conjunction with the accompanying drawings:
[0059] basic structure
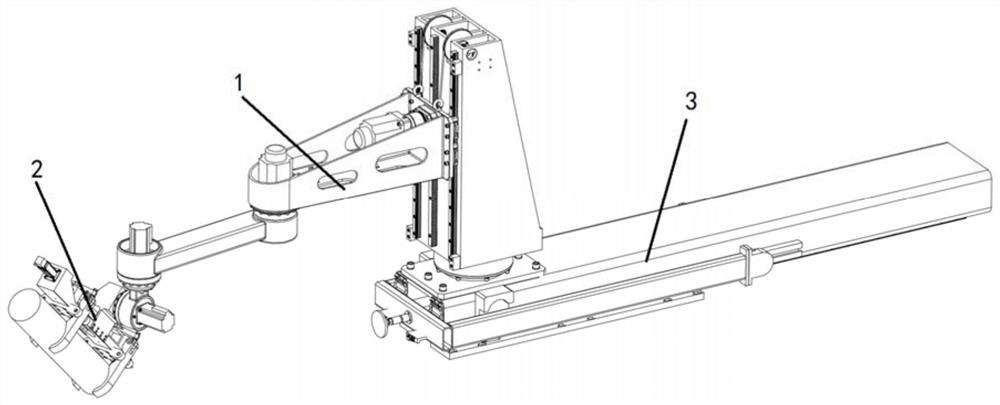
[0060] Such as figure 1 As shown, it mainly includes robot body 1, fixture 2 and telescopic platform 3. The robot body 1 is installed on the telescopic platform 3, and the robot body 1 reciprocates under the drive of the telescopic platform 3;
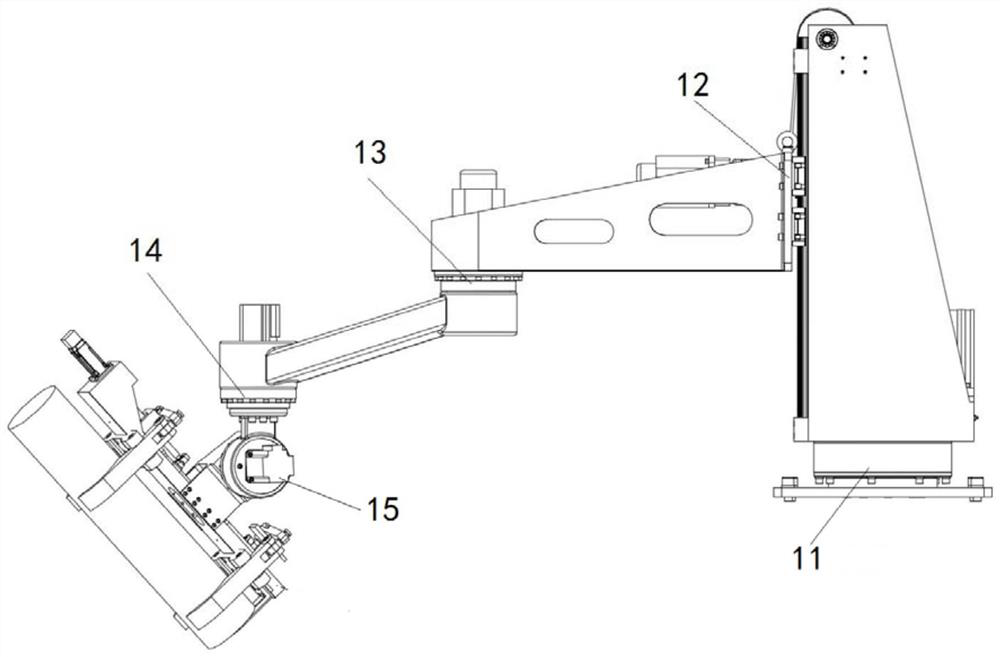
[0061] Such as figure 2 , the robot body 1 includes a first joint 11, a second joint 12, a third joint 13, a fourth joint 14, and a fifth joint 15 arranged in series; wherein, the first joint 11, the third joint 13, and the fourth joint 14 And the fifth joint 15 is for rotating motion, and the second joint 12 is for lifting motion;
[0062] The end of the fifth joint 15 is equipped with a gripper 2 for picking up ammunition. This structural design is convenient for long-distance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More