A pipe crawling robot and its crawling method
A crawling robot and robot technology, applied in the field of bionic robots, can solve the problems of large energy loss, limited traction force, complex structure and other problems in the movement mode, and achieve the effect of simple structure, low cost and low energy loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
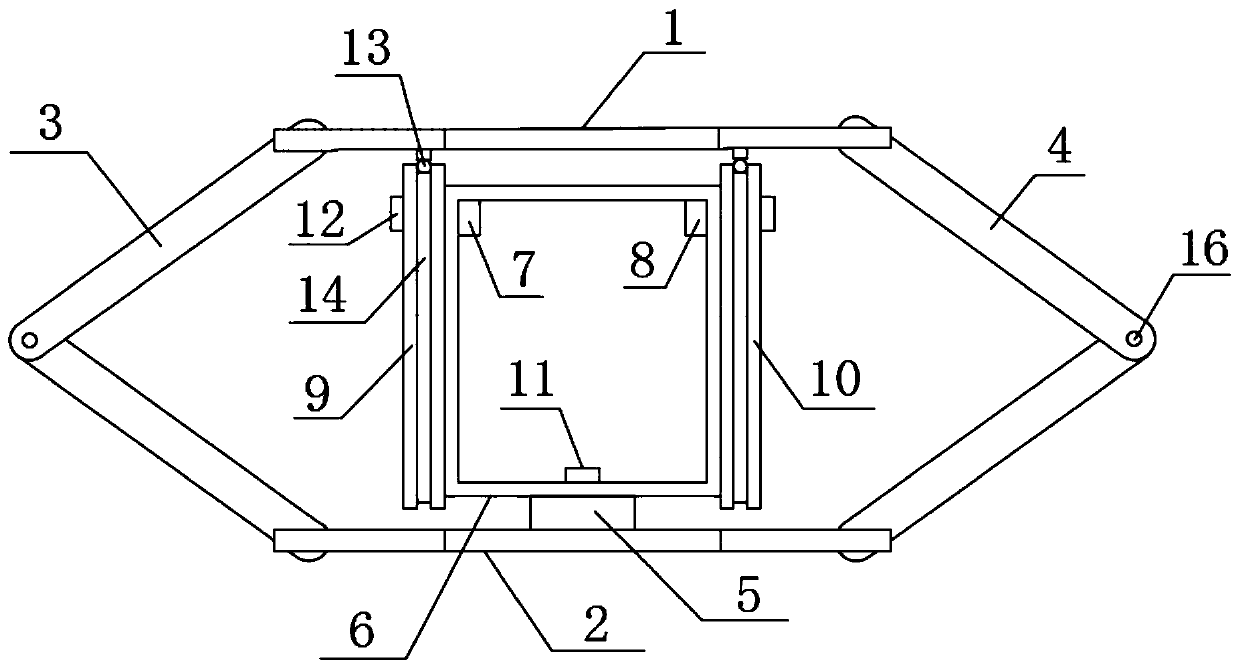
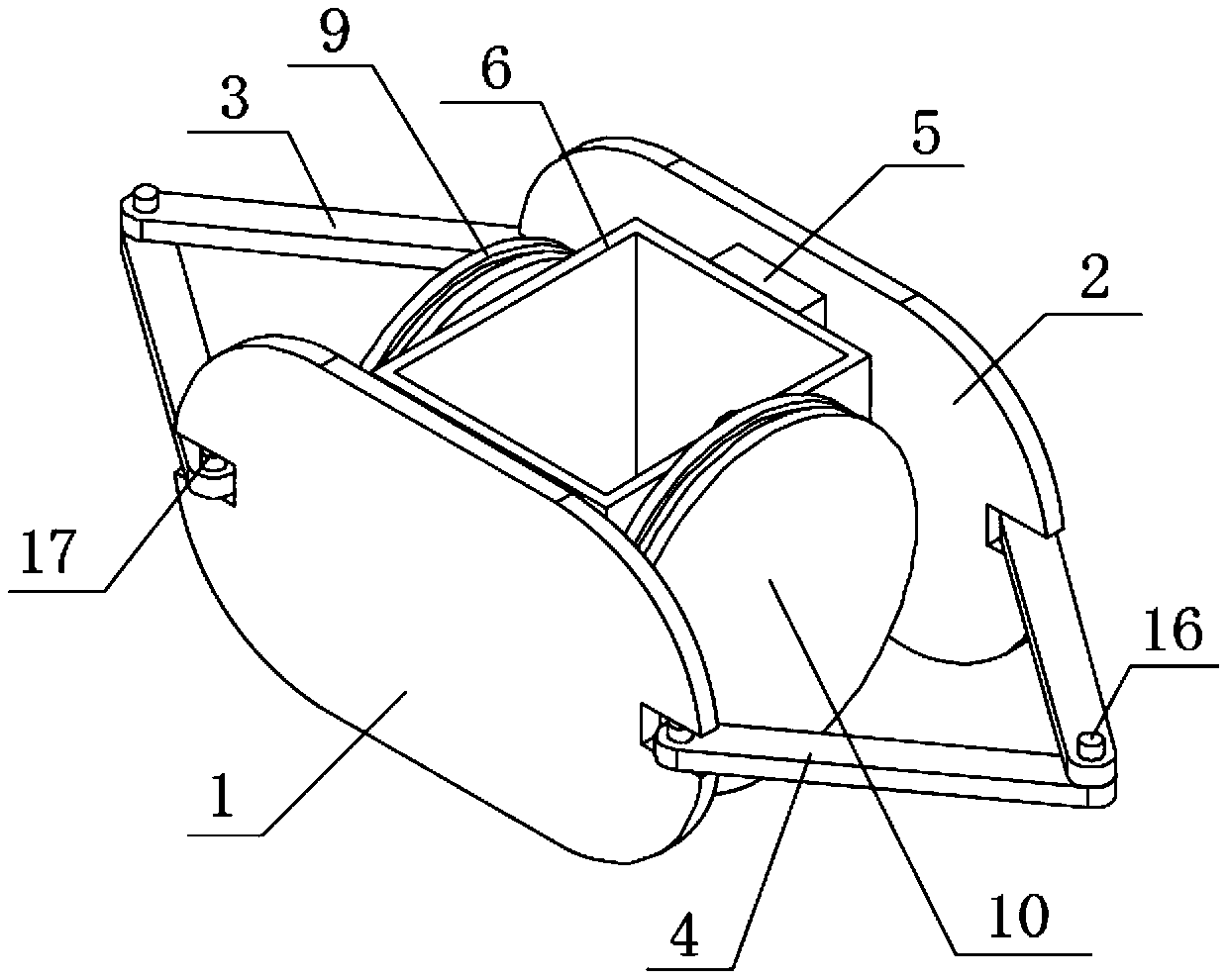
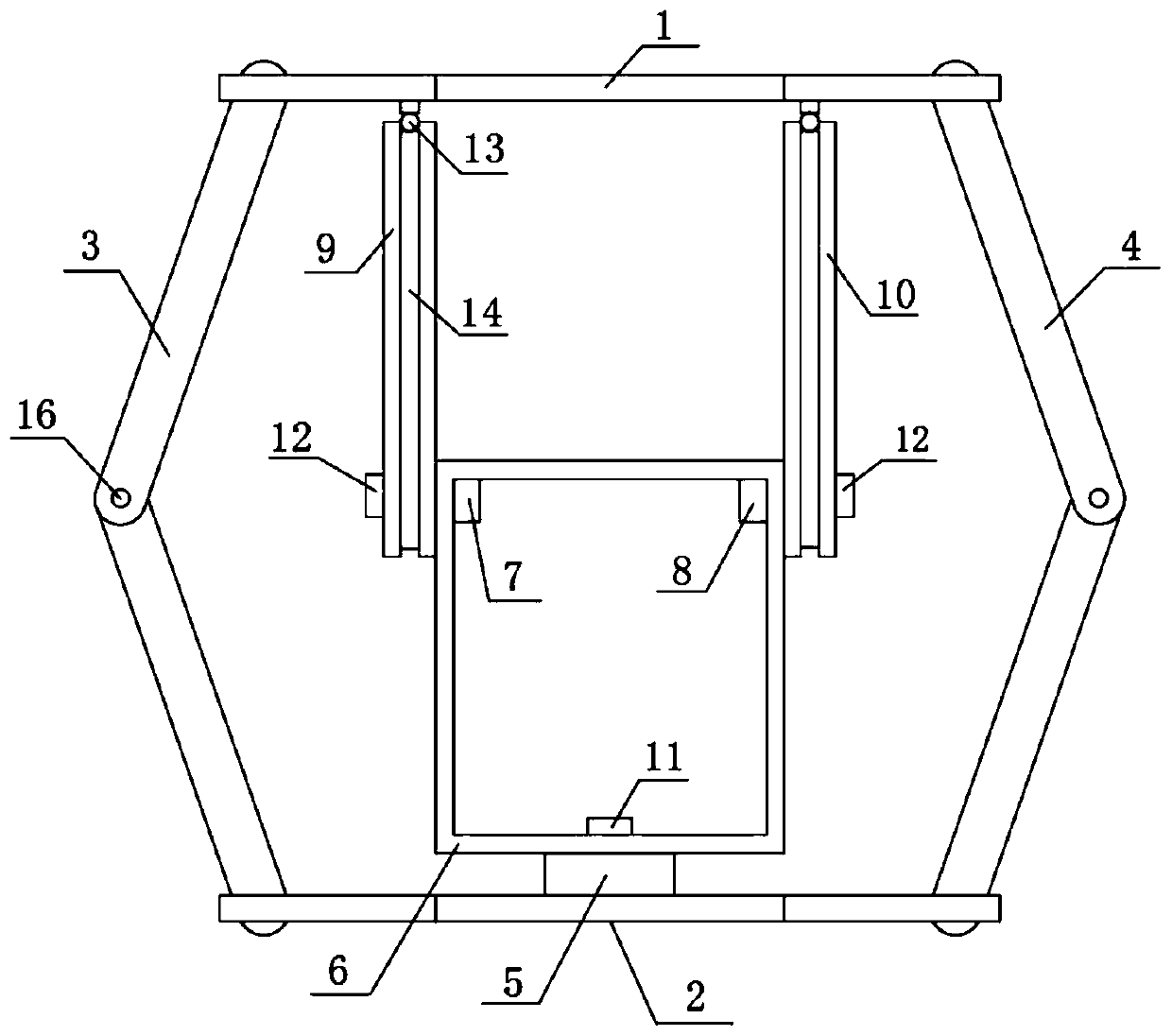
[0040] Such as Figures 1 to 3 As shown, this embodiment discloses a pipeline crawling robot, which includes four telescopic mechanisms with the same structure and connected end to end in sequence, namely the first telescopic mechanism 100, the second telescopic mechanism 200, the third telescopic mechanism 300 and the fourth telescopic mechanism. Mechanism 400; the telescopic mechanism includes: an upper support plate 1, a lower support plate 2, a first support link 3, a second support link 4, a support platform 5, a box body 6, a first motor 7, and a second motor 8 1. The first eccentric wheel 9 and the second eccentric wheel 10; the upper support plate 1 of the first telescopic mechanism 100 is provided with a detection unit for detecting internal obstacles or bends in the pipeline;
[0041] The upper support plate 1 and the lower support plate 2 are movably connected through the first support link 3 and the second support link 4; the support platform 5 is arranged on the l...
Embodiment 2
[0051] Such as Image 6 As shown, this embodiment provides a crawling method for a pipeline crawling robot in a vertical pipeline, which specifically includes the following steps:
[0052] S11, the robot is in the initial crawling state, the first telescopic mechanism 100 and the second telescopic mechanism 200 of the robot are in a retracted state, and the third telescopic mechanism 300 and the fourth telescopic mechanism 400 of the robot are in a stretched state; through the first telescopic mechanism 100 and The supporting link of the second telescoping mechanism 200 is against the pipe to provide friction and prevent the robot from falling;
[0053] S12, the first telescopic mechanism 100 of the robot is converted into a stretched state, and at the same time, the third telescopic mechanism 300 is converted into a contracted state, pulling the fourth telescopic mechanism 400 to move upward; supported by the second telescopic mechanism 200 and the third telescopic mechanism ...
Embodiment 3
[0060] Such as Figure 5 , 7 As shown, this embodiment provides a method for a pipeline crawling robot to crawl on a curve, which specifically includes the following steps:
[0061] S21, when the detection unit on the first telescopic mechanism 100 detects a curve, the second telescopic mechanism 200, the third telescopic mechanism 300, and the fourth telescopic mechanism 400 are in the retracted state, and the control module in the first telescopic mechanism 100 controls the second The first motor 7 and the second motor 8 implement differential control, so that the first telescopic mechanism 100 stretches at a small angle near the first support link 3 on the inside of the curve, and stretches at a large angle near the second support link 4 on the outside of the curve , so that the first telescopic mechanism 100 of the robot enters the curve;
[0062] S22, the control module in the second telescopic mechanism 200 of the robot performs differential control on the first motor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More