Capability plot point cloud updating method and device, equipment and storage medium
A technology for updating methods and capabilities, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., which can solve problems such as the inability to describe the workspace in real time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
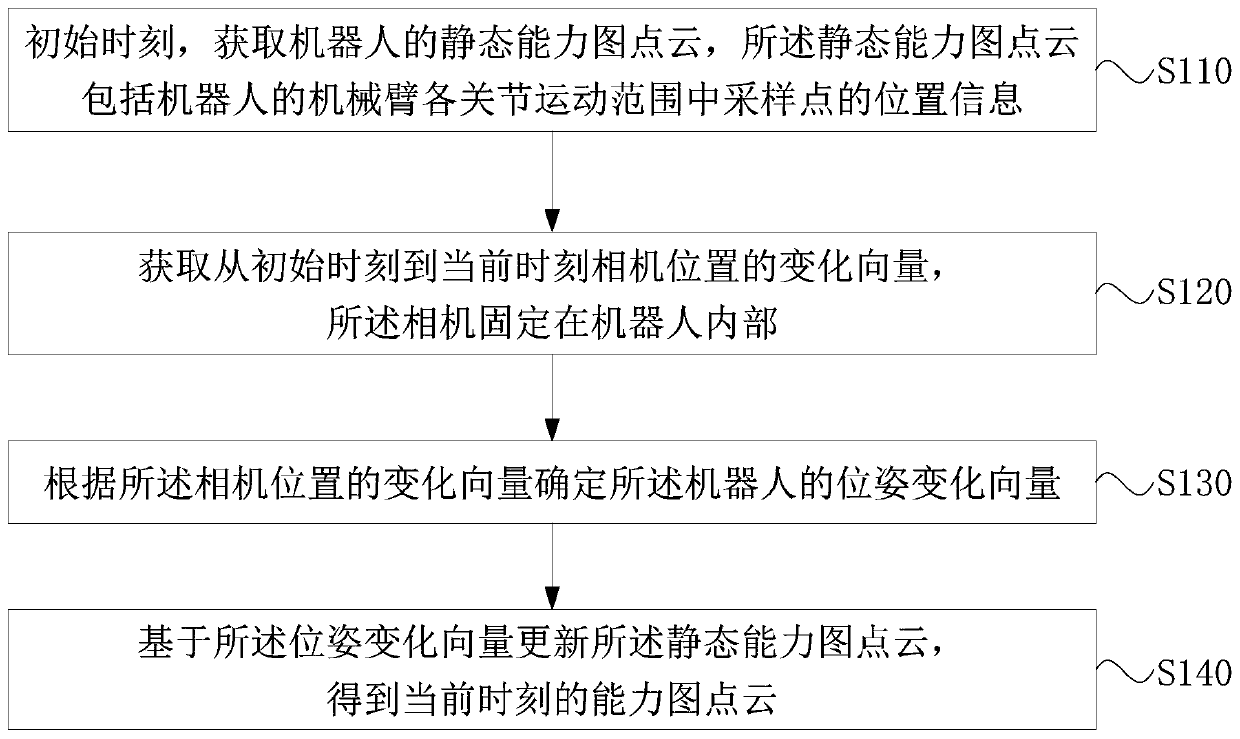
[0050] figure 1 It is a flow chart of a method for updating a point cloud of a capability map provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of describing a real-time workspace during the moving process of a robot. Specifically, the capability map point cloud update method can be executed by a capability map point cloud update device, which can be implemented in software and / or hardware and integrated into the device. Further, the devices include, but are not limited to: electronic devices such as desktop computers, industrial computers, and host computers.
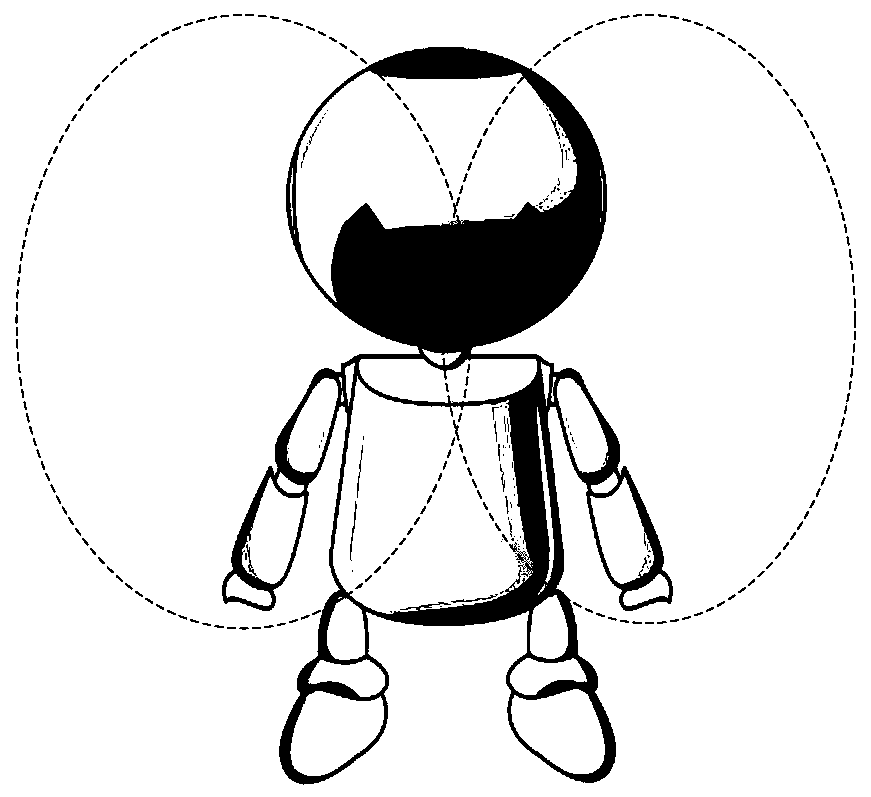
[0051] figure 2 It is a schematic diagram of an application scenario of a capability map point cloud in Embodiment 1 of the present invention. Such as figure 2 As shown, according to the connecting rod and joint structure of the humanoid robot, the geometric model of the robot is abstracted, combined with the kinematic equations, the relationship between the pose of ...
Embodiment 2
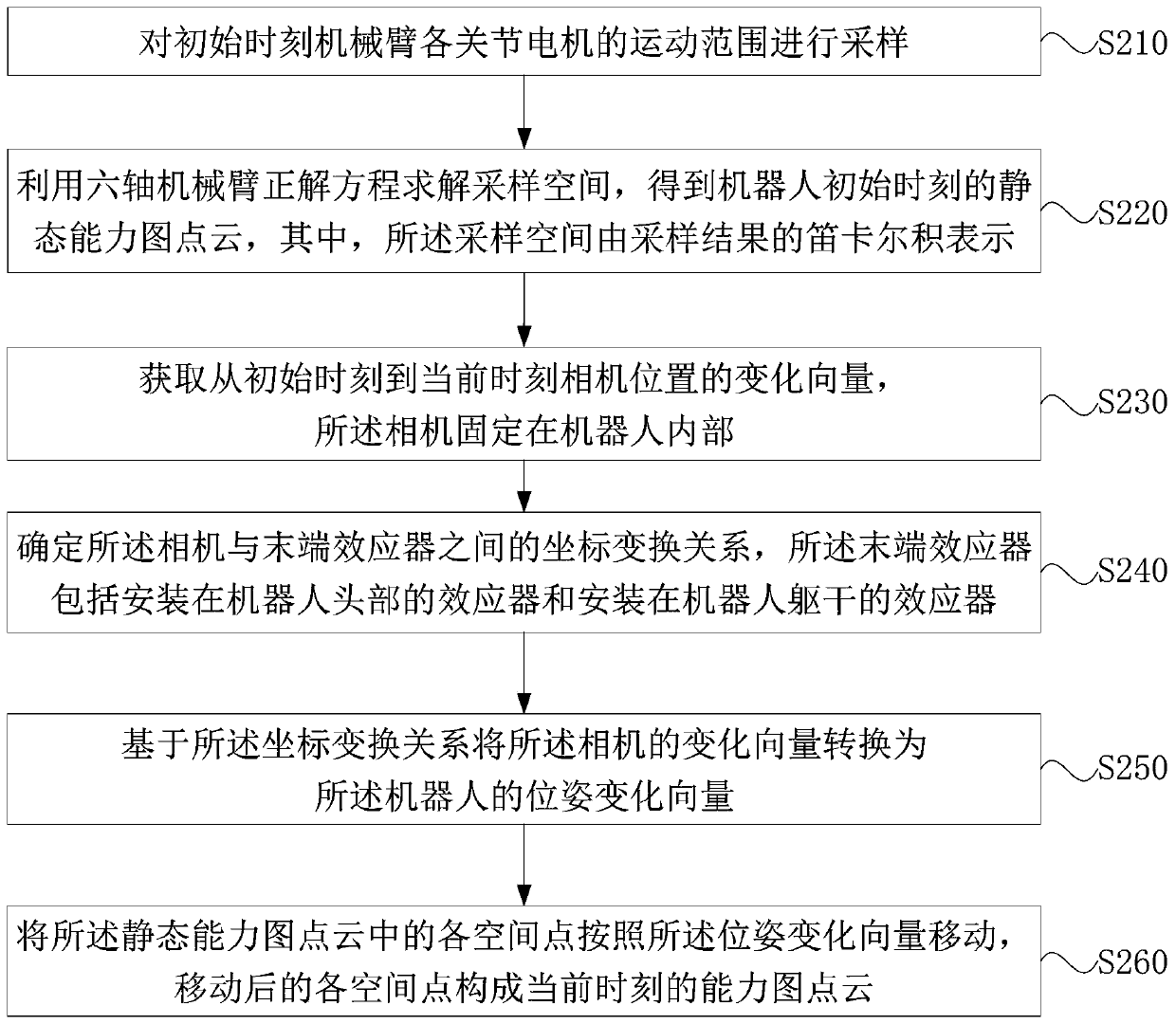
[0064] image 3 It is a flow chart of a capability map point cloud update method provided by Embodiment 2 of the present invention. This embodiment optimizes the coordinate transformation relationship between the camera and the end effector and the pose change vector on the basis of the above embodiment. It should be noted that for technical details that are not exhaustively described in this embodiment, reference may be made to any of the foregoing embodiments.
[0065] Specifically, refer to image 3 , the method specifically includes the following steps:
[0066] S210. Sampling the motion ranges of the motors of the joints of the mechanical arm at the initial moment.
[0067] Specifically, the motion range of each joint motor of the robot manipulator is determined according to the connecting rod and joint structure of the robot, as well as the kinematic equation, and sampling is performed in all motion ranges, and the obtained various joint states form the sampling space....
Embodiment 3
[0084] Figure 4 A flow chart of a method for updating a capability map point cloud provided by Embodiment 2 of the present invention. This embodiment is based on the above-mentioned embodiment and performs specific optimization. Based on Octomap, a three-dimensional point cloud map of the space around the robot is constructed and updated. The occupancy nodes of obstacles and noises are considered in the point cloud of the ability map, and the unreachable points can be removed in combination with the actual environment during the robot's moving process. It should be noted that for technical details not exhaustively described in this embodiment, reference may be made to any of the foregoing embodiments.
[0085] Specifically, refer to Figure 4 , the method specifically includes the following steps:
[0086] S301. Sampling the motion ranges of the motors of the joints of the robotic arm at the initial moment.
[0087] S302. Use the forward solution equation of the six-axis m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com