

A monocular camera object pose estimation method and device based on deep learning
A pose estimation and deep learning technology, applied in computing, image analysis, instruments, etc., can solve the problem of high application cost of object pose estimation, and achieve the effect of reducing application cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
[0062] The embodiment of the present invention provides a method and device for estimating the object pose of a monocular camera based on deep learning. The following firstly introduces a method for estimating the object pose of a monocular camera based on deep learning provided by the embodiment of the present invention.
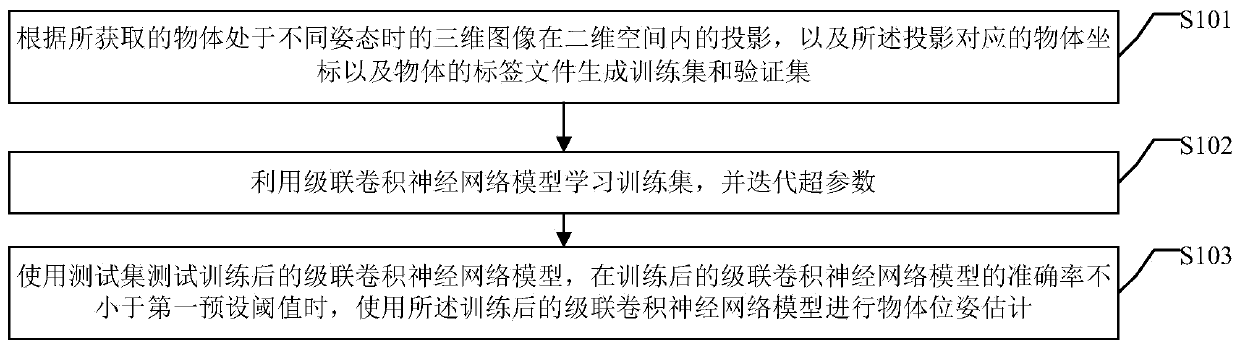
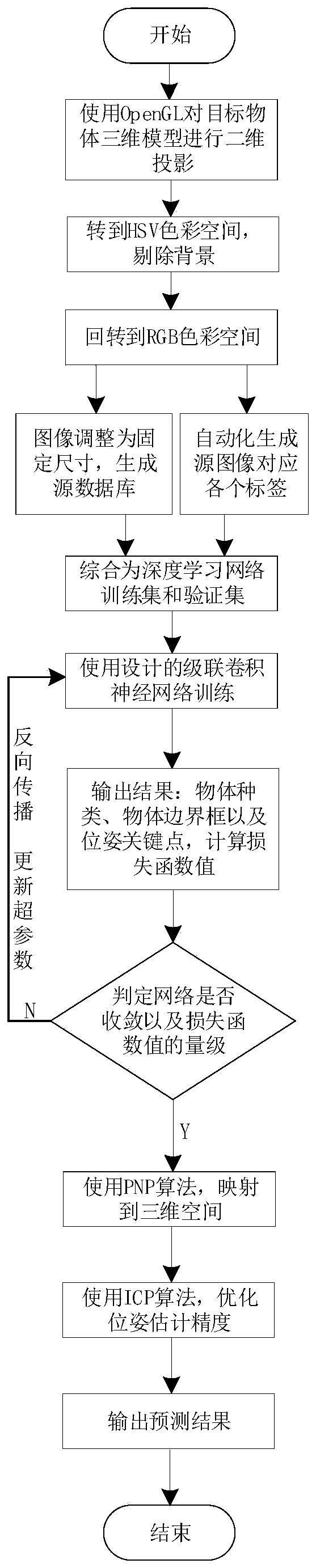
[0063] figure 1 A schematic flowchart of a method for estimating the pose of a monocular camera object based on deep learning provided by an embodiment of the present invention; figure 2 A schematic diagram of the principle of a method for estimating the pose of a monocular camera object based...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More