

A driving force control device for climbing a robot
A control device and robot technology, applied in the field of robots, can solve the problems of no climbing speed control, unfavorable robot stability, poor grip of walking wheels, etc., and achieve the effects of reducing blind spots, reducing device wear and extending service life.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
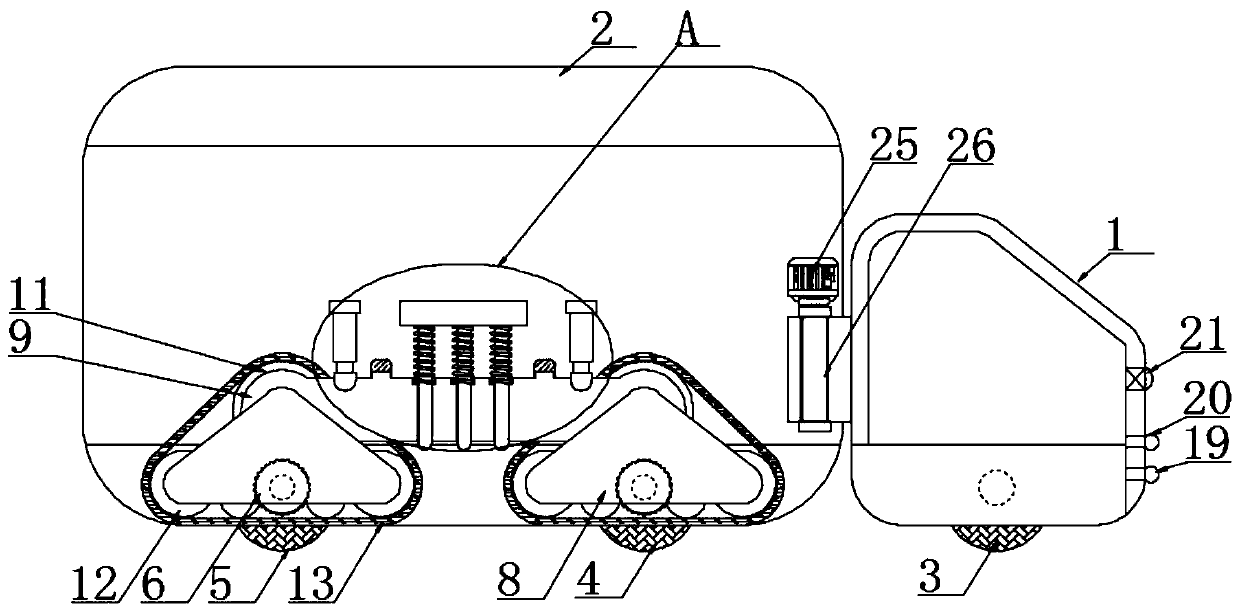
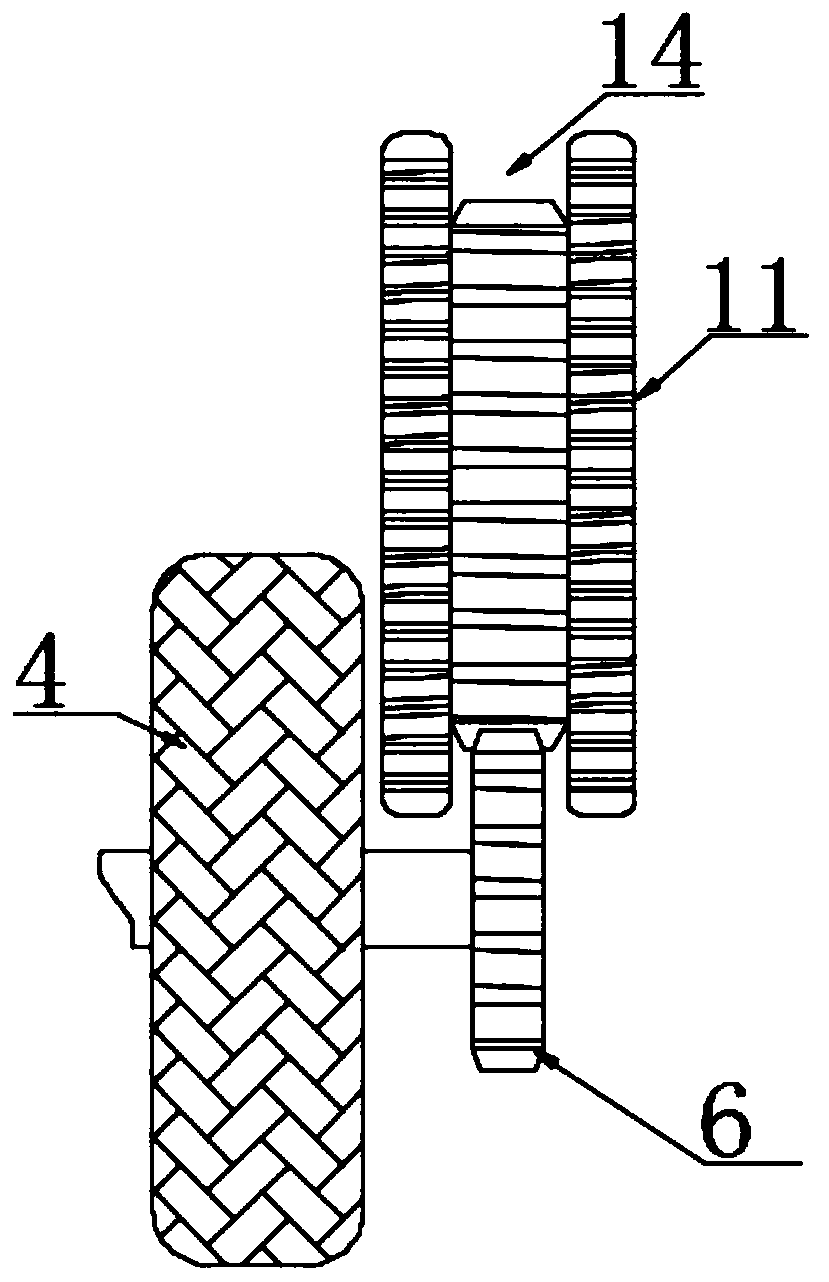
[0029] according to Figure 1-6 The driving force control device for a robot climbing shown includes a traction head 1, a box body 2 is movably connected to one side of the traction head 1, a traction wheel 3 is provided at the bottom of the traction head 1, and the box body 2 Bottom is provided with driving wheel 4 and driven wheel 5, and described driving wheel 4 and driven wheel 5 outsides are all fixedly connected with fixed gear 6, and described driving wheel 4 is provided with driving motor 7 away from fixed gear 6 side, and described driving The output shaft of the motor 7 is driven and connected to the driving wheel 4, and both sides of the box body 2 are provided with a climbing mechanism, and the climbing mechanism includes two fixed tripods 8 arranged horizontally, between the two fixed tripods 8 A lifting frame 9 is fixedly connected, an electric push rod 10 is fixedly connected to both sides of the box body 2, the output end of the electric push rod 10 is fixedly ...
Embodiment 2
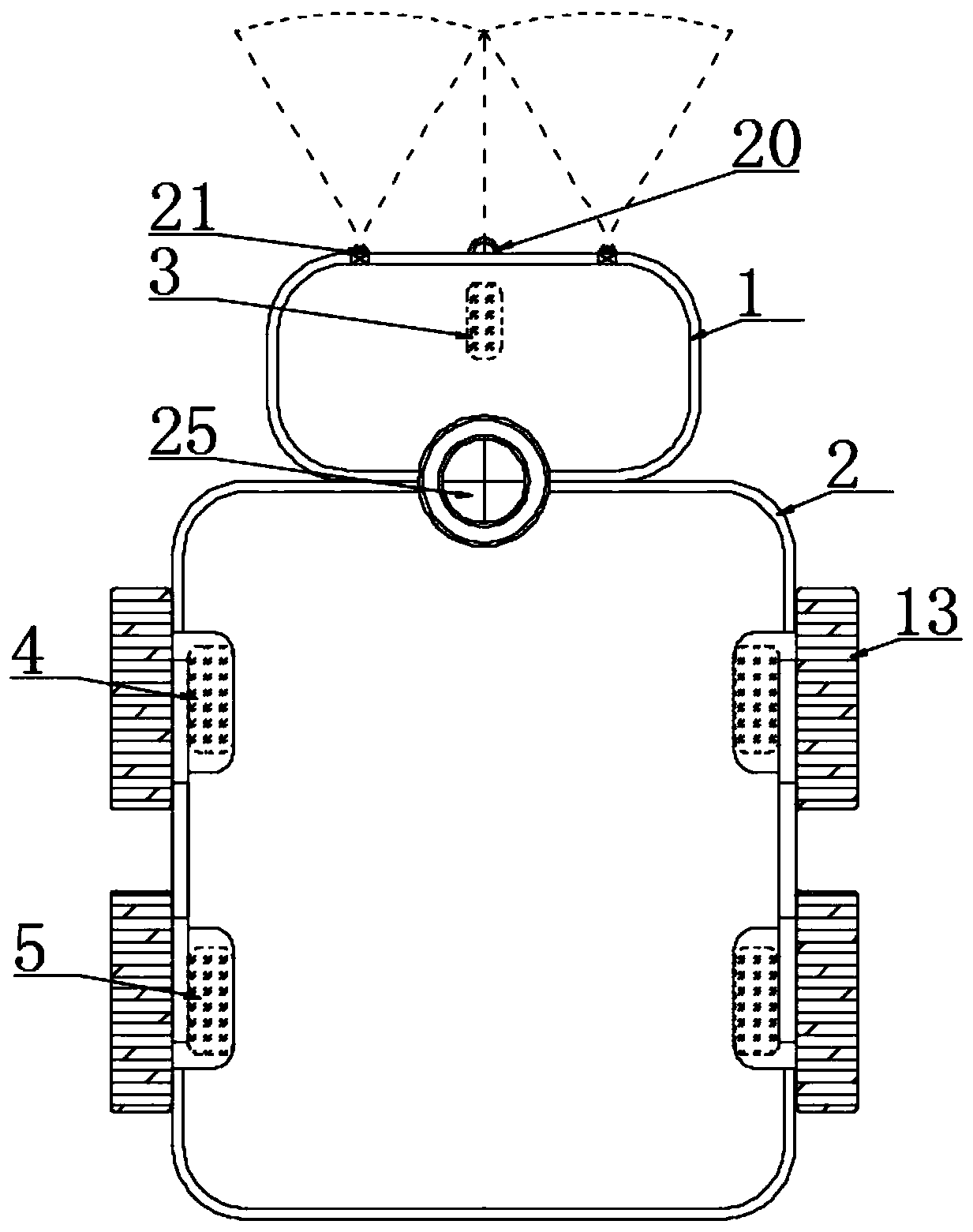
[0035] according to Figure 1-4 A driving force control device for climbing a robot is shown, the obstacle avoidance mechanism includes a steering motor 25 and a steering shaft 26, the output shaft of the steering motor 25 is connected to the steering shaft 26, and the steering shaft 26 is connected to the traction head 1 Integrated setting, the steering shaft 26 is rotationally connected with the box body 2, the ultrasonic sensor 20 senses the road conditions in front of the traction head 1, and uses the camera 21 to take real-time images, and sends the road condition information to the single-chip microcomputer 22. Obstacles, the single-chip microcomputer 22 analyzes the obstacle avoidance route according to the real-time image and the obstacle distance sensed by the ultrasonic sensor 20, the single-chip microcomputer 22 controls the steering motor 25 to work, and the output shaft of the steering motor 25 is driven to connect the steering shaft 26 to make the traction head 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More