

Packaging system based on double-arm robot
A packaging system and robot technology, applied in packaging, transportation packaging, transportation and packaging, etc., can solve the problems of scattered functional modules of automated packaging equipment, high operation and maintenance costs, low production efficiency, etc., to achieve a small footprint and reduce operation. cost, the effect of improving utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in further detail below in conjunction with the accompanying drawings.
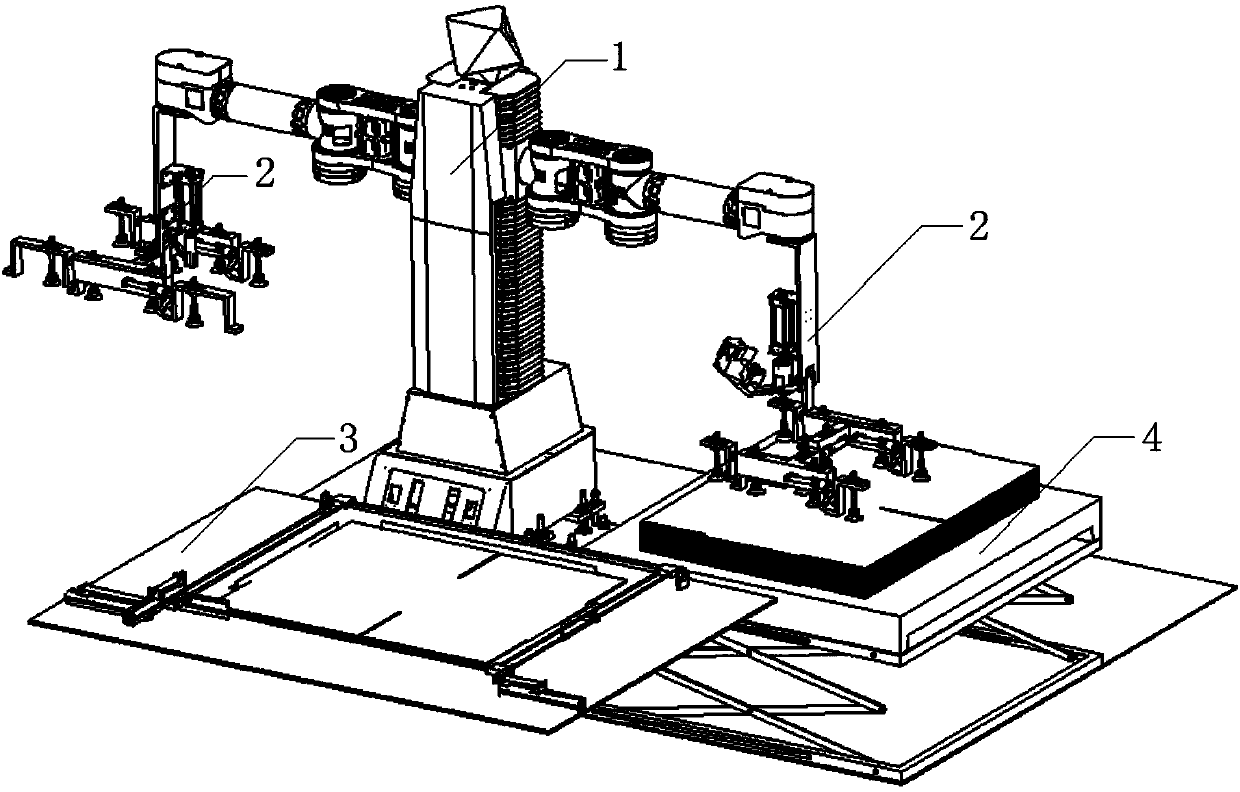
[0033] Such as Figure 1-11 As shown, the present invention includes a dual-arm robot 1, a folding finger mechanism 2 and a positioning mechanism 3, the free ends of the mechanical arms on both sides of the dual-arm robot 1 are provided with a folding finger mechanism 2, and the positioning mechanism 3 is arranged on the dual-arm robot 1 On the packaging station on the front side, the carton is placed in the positioning mechanism 3 and positioned by the positioning mechanism 3, and then the two folding finger mechanisms 2 cooperate to simulate human hands to complete the carton folding and pasting and sealing operations.
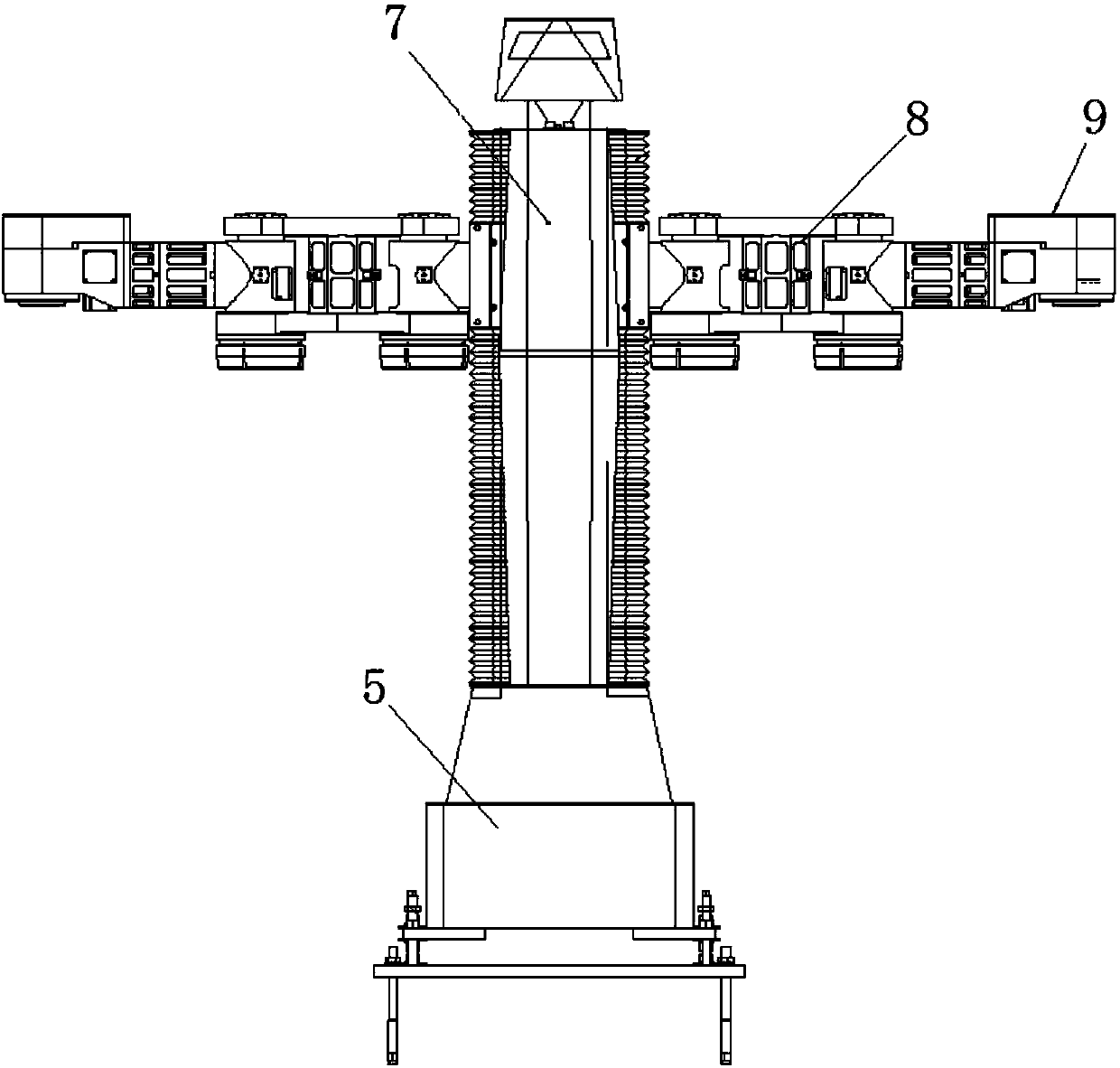
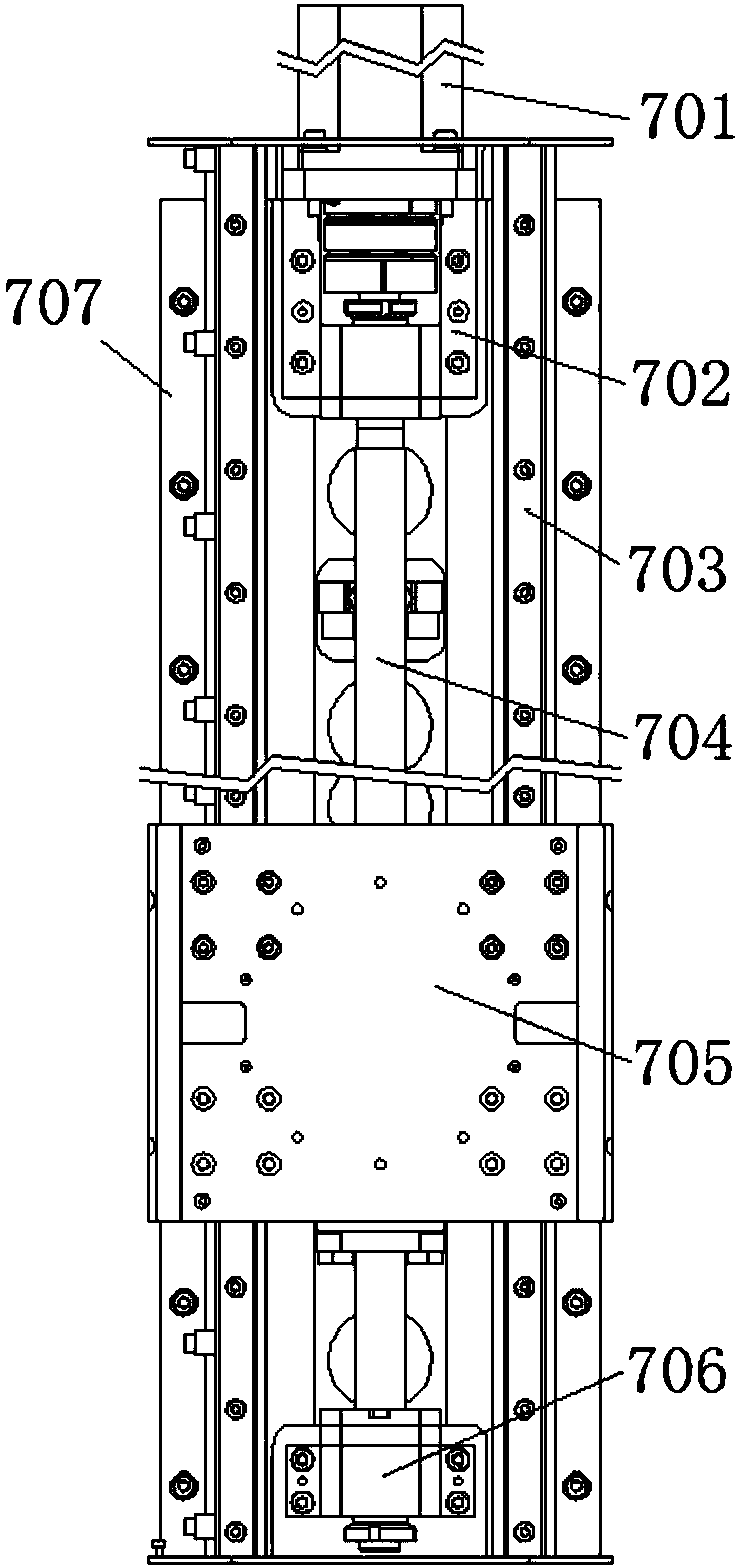
[0034] Such as figure 2 As shown, the dual-arm robot 1 includes a base 5, a mechanical arm lifting mechanism 7 and mechanical arms on both sides, and the mechanical arm lifting mechanism 7 is arranged on the base 5, as image 3As shown, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More