Double-mechanical arm calibration method based on camera optical axis constraint
A dual manipulator and calibration method technology, applied in the field of robot calibration, can solve the problems of lower absolute positioning accuracy of the end of the manipulator, kinematic parameter error, complex calibration process, etc., and achieves reduced calibration costs, fewer calibration steps, and calibration accuracy. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below in conjunction with the accompanying drawings.
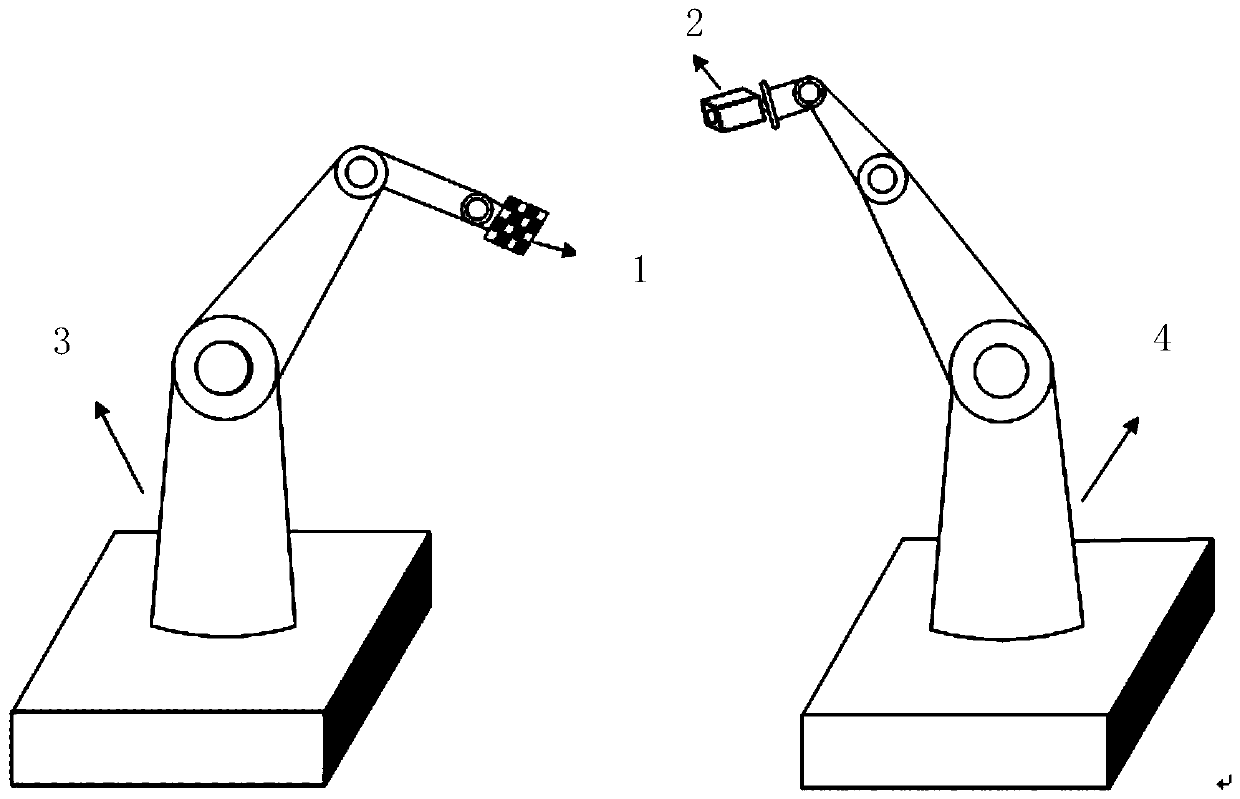
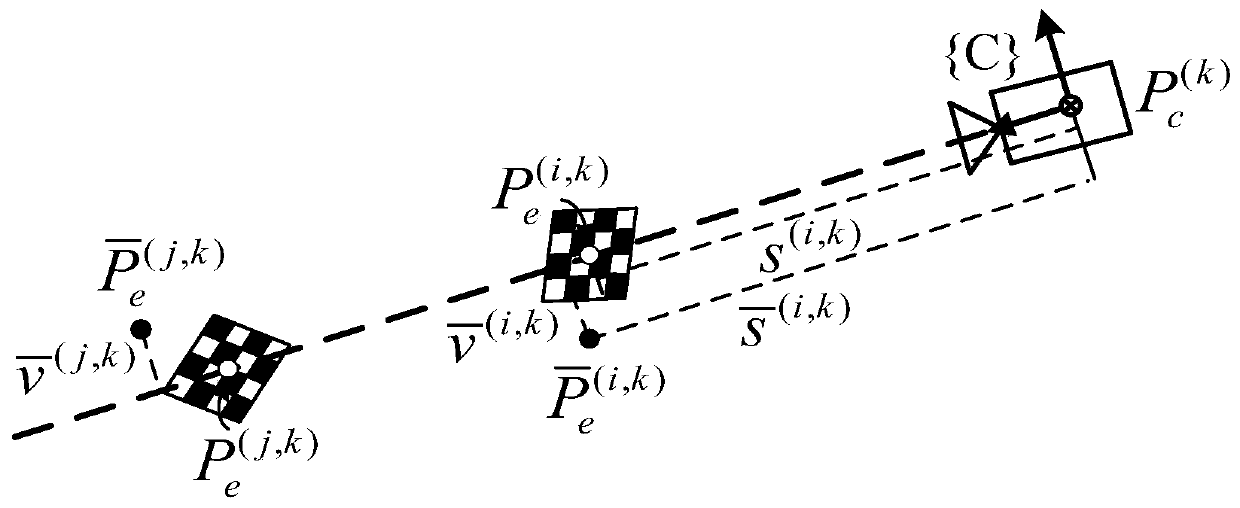
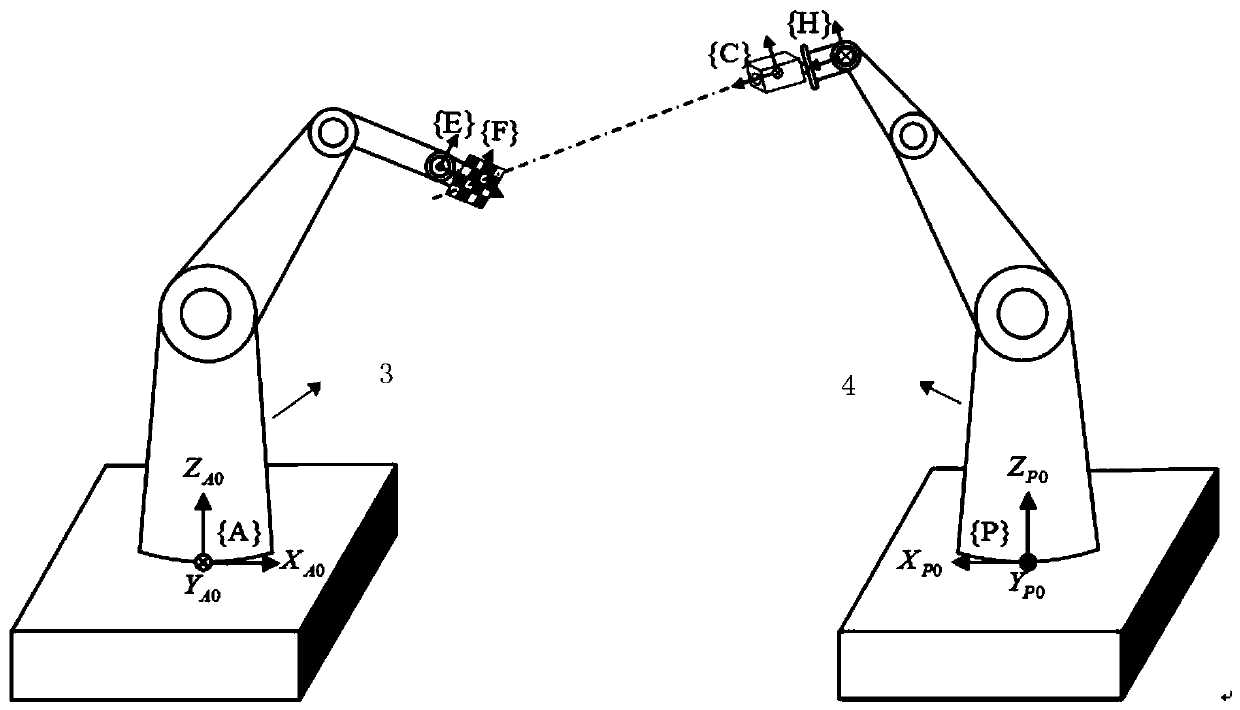
[0038] The invention provides a method for calibrating dual mechanical arms based on camera optical axis constraints. At present, robots are developing rapidly, and more and more fields require dual-arm collaborative robots. In order to successfully complete the operation tasks, the dual-arm system must be calibrated. In view of the low positioning accuracy of the current dual-arm collaborative robot, the present invention simultaneously completes the calibration of kinematic parameters and base coordinates of the two robotic arms, providing technical support for the dual-arm system to complete high-precision tasks. The basic idea of the present invention is to make the optical axis of the camera installed at the end of one manipulator serve as a virtual linear constraint, and the pose of the other end of the manipulator satisfy the virtual constraint of the optica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More