

Pneumatic anti-breakage grasping claw for eggs and grasping method thereof
A technology of claws and eggs, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of egg position changes, egg placement postures are not uniform, eggs are not positioned accurately, etc., to prevent repeated feeding, improve efficiency, Guaranteed continuity of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
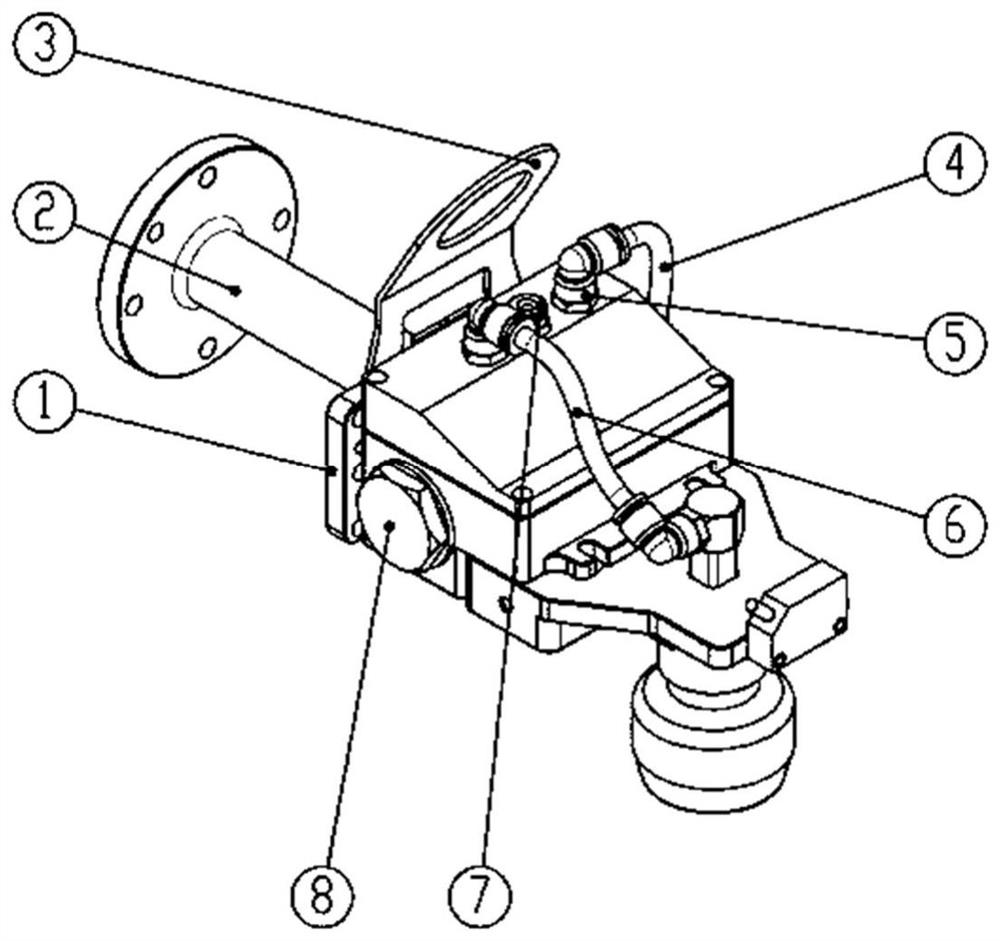
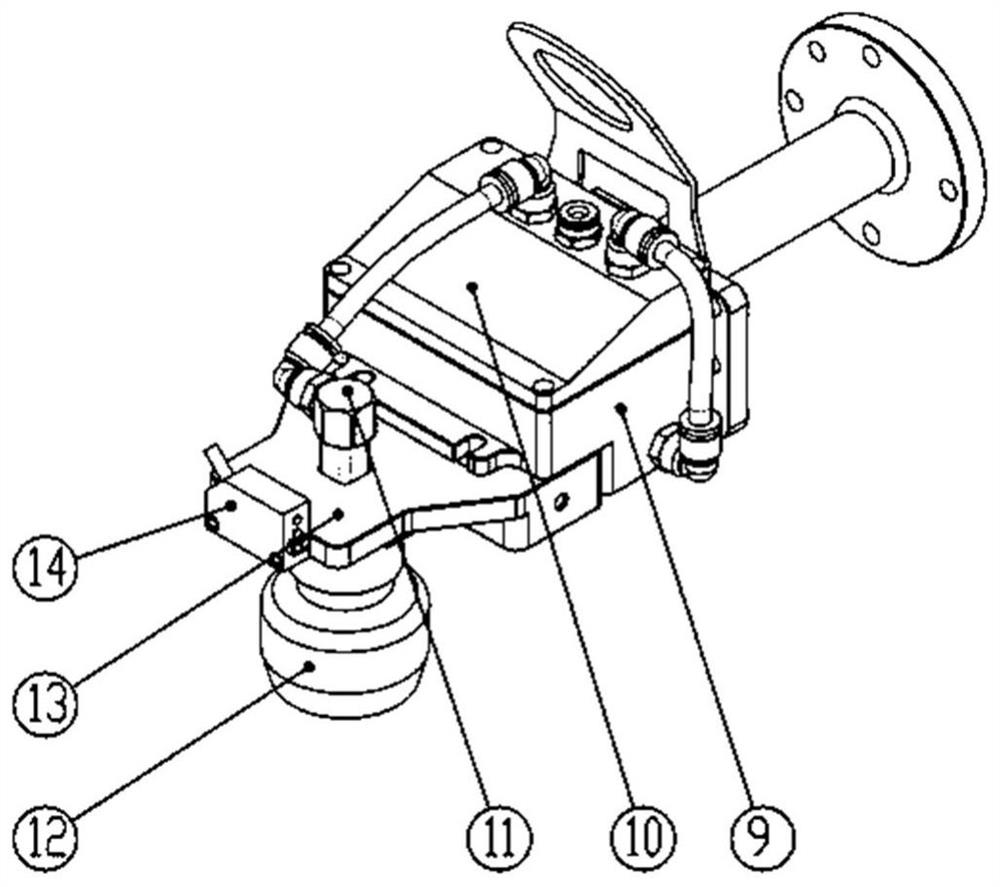
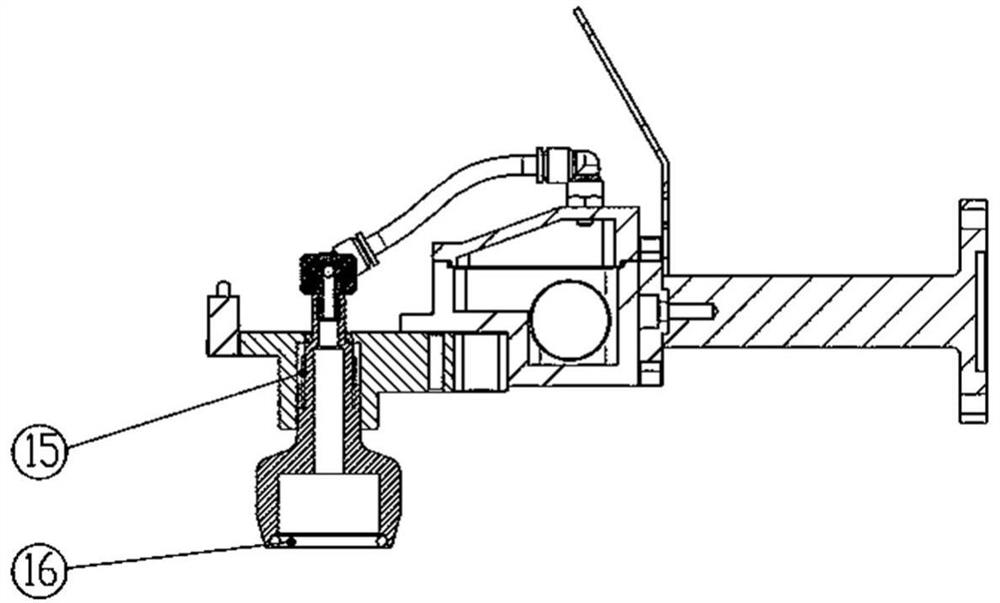
[0028] see Figure 1-4 , The grasping claw of the present invention is mainly composed of three groups of functional blocks: egg grasping, egg liquid collection, and material level detection.
[0029] Among them, the claw installation base plate 1, the claw connecting rod 2 and the pipeline support 3 are assembled to form a connecting mechanism for grabbing eggs, which are used to connect the six-axis robot and the grabbing claw of the present invention; the egg liquid collection box 9, the egg The egg liquid collection box cover 10 and the liquid level mirror 8 are assembled to form an egg liquid collection box assembly, wherein the mounting surface of the egg liquid collection box 9 and the egg liquid collection box cover 10 needs to be coated with sealant to ensure the airtightness of the cavity of the box body; Claw 12, bracket plate 13, photoelectric se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More