

Obstacle detecting method and device and unmanned aerial vehicle
A technology for obstacle detection and drones, applied in the field of drones, can solve the problems of poor detection effect and the accuracy of obstacle detection under the stability of drones, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
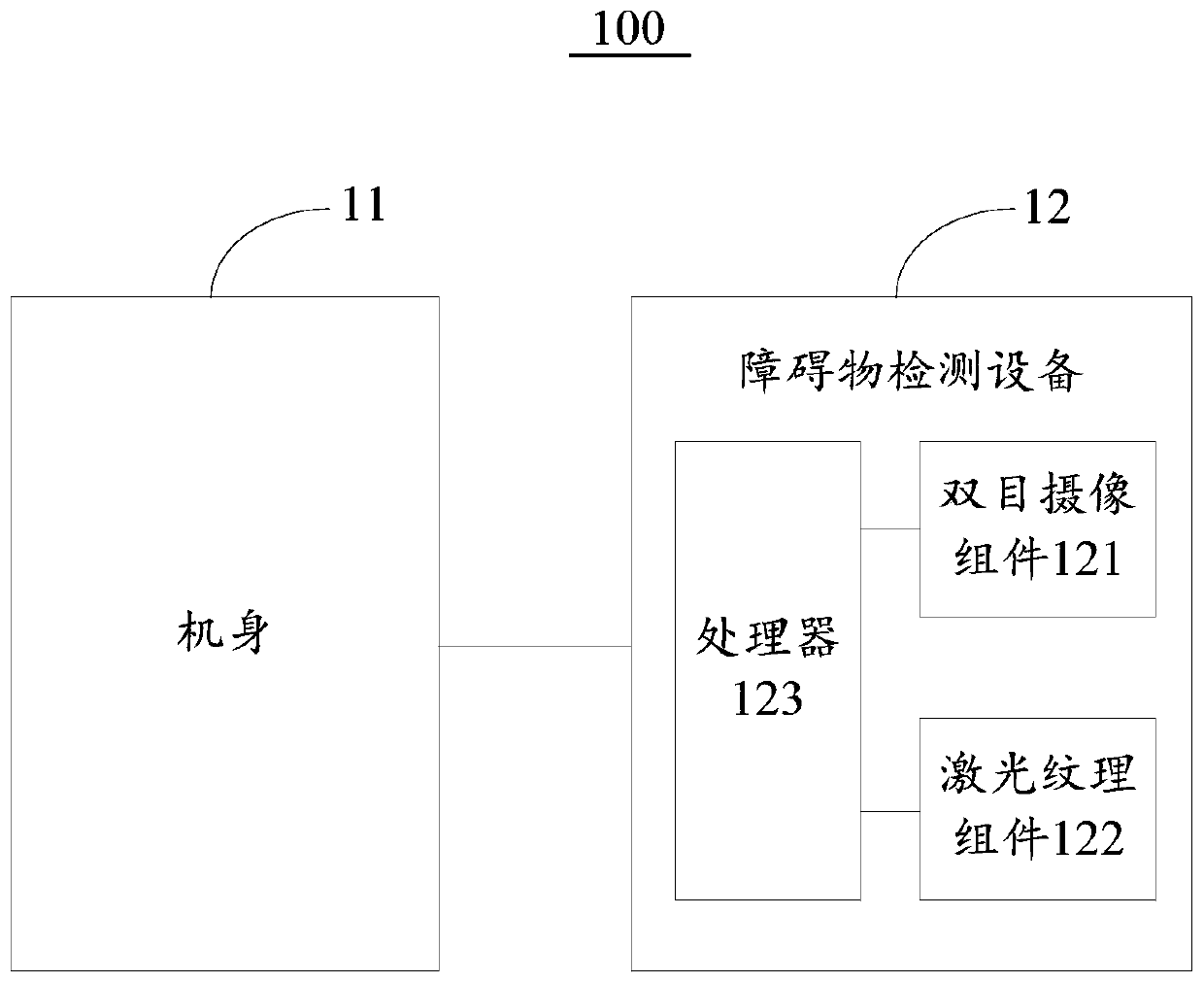
[0099] see figure 1 , is a hardware block diagram of an unmanned aerial vehicle provided by an embodiment of the present invention. The unmanned aerial vehicle 100 includes: a fuselage 11, an arm connected to the fuselage, a power device arranged on the arm, and an The obstacle detection device 12 of the body 11. The number of arms is at least two, and the arms can be fixedly connected, integrally formed or detachably connected to the fuselage 11 . The power unit usually includes a motor located at the end of the arm and a propeller connected to the motor, and the power unit is used to provide lift or flight power for the drone to fly.
[0100] Wherein, the fuselage 11 is the main body of the UAV 100, on which various functional parts of the UAV 100 (for example, the landing gear used to support the UAV 100, etc. ) and various functional circuit components of the drone 100 (for example, Micro-programmed Control Unit (MCU), Digital Signal Processor (Digital Signal Processor, ...
Embodiment 2
[0120] Image 6 It is a schematic flow chart of an obstacle detection method provided by an embodiment of the present invention, which can be applied to any movable carrier with a binocular camera component and a laser texture component, for example, as figure 1 A drone 100 is shown.
[0121] Specifically, see Image 6 , the method may include but not limited to the following steps:
[0122] Step 110: Start the laser texture component to emit laser texture.
[0123] As mentioned above, the laser texture component is used to emit the laser texture that can be sensed by the binocular camera component. The projection range of the laser texture component may partially or completely cover the binocular viewing angle range of the binocular camera component. Therefore, the laser texture emitted by the laser texture component can fill the area with sparse texture in the shooting scene of the binocular camera component, and enhance the texture of the shooting scene of the binocular...
Embodiment 3
[0133] In an application scenario that requires high obstacle detection accuracy, for example, when the drone lands, you can refer to the obstacle detection method described in the second embodiment above, and start the laser texture component throughout the process to emit laser texture . However, in some other applications, for example, when the scene texture is rich and the light is sufficient, only conventional binocular sensing (that is, no need for laser components to emit laser texture) can also achieve higher barriers object detection accuracy.
[0134] Therefore, in order to reduce the energy consumption of the obstacle detection device while ensuring the accuracy of obstacle detection, the embodiment of the present invention also provides another obstacle detection method. This method is different from the obstacle detection method described in Embodiment 2 in that: before starting the laser texture component to emit laser textures, it is first determined to turn on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More