

Four-rotor aircraft attitude control method and controller
A quadrotor aircraft, attitude controller technology, applied in attitude control, three-dimensional position/channel control and other directions, can solve the problems of numerical instability and long calculation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
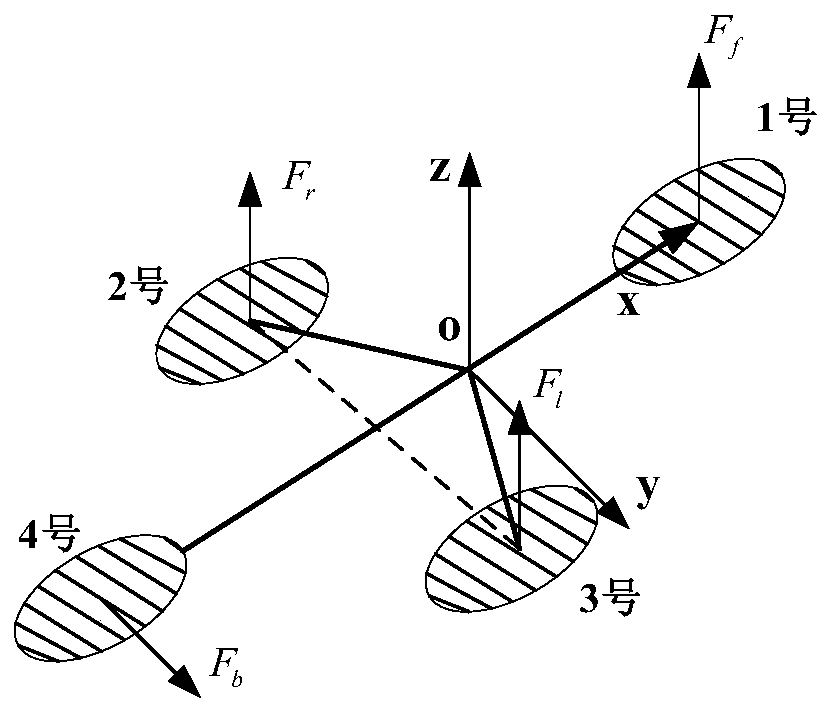
[0031] The structure schematic diagram of quadrotor aircraft among the present invention is as figure 1 Shown: In order to study the attitude control of the quadrotor aircraft, the three degrees of freedom of the aircraft are locked to reduce the complexity of the control and avoid damage to the aircraft. Therefore, the aircraft has 4 inputs and 3 outputs. The outputs of the aircraft are pitch angle, flip angle, and cruise angle, and the inputs are the control voltages of the four motors that drive the rotors. The four propellers arranged in a cross-symmetrical structure are respectively powered by four motors. It can be seen that 3 of the 4 rotors are installed horizontally, and they control the pitching and flipping motion of the aircraft, and one is placed vertically. , used to control the cruise direction of the aircraft. The motor data is exchanged with the PC through the PCI card, and the voltage of the motor is controlled in real time under the SIMULINK real-time contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More