

An SLAM map splicing method and system
A map and sub-map technology, applied in the field of SLAM map stitching methods and systems, can solve the problems of SLAM tracking loss and mapping failure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
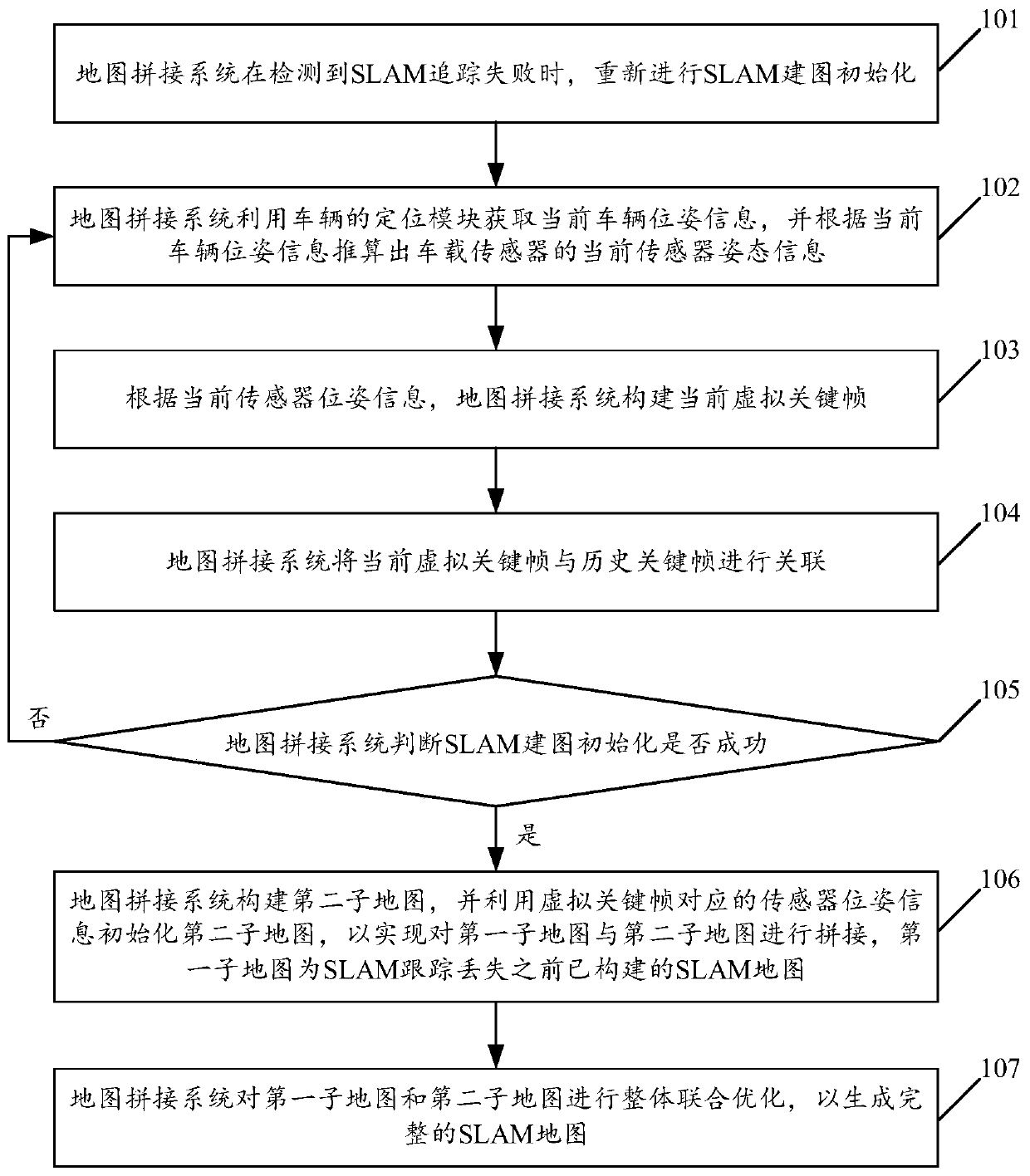
[0065] see figure 1 , figure 1 It is a schematic flowchart of a SLAM map mosaic method disclosed in an embodiment of the present invention. like figure 1 As shown, the SLAM map stitching method is applied to a map stitching system, and may specifically include the following steps.
[0066] 101. When the map stitching system detects that SLAM tracking is lost, it re-initializes SLAM mapping.
[0067] The embodiment of the present invention is applicable to visual SLAM mapping and laser SLAM mapping. Taking visual SLAM mapping as an example to illustrate, visual SLAM mapping mainly includes the following steps:
[0068] The front-end performs feature point matching on adjacent image frames based on the image frames continuously collected by the vehicle-mounted sensor. The vehicle-mounted sensor can be a vehicle-mounted camera, specifically a monocular camera, a binocular camera, or a depth camera. limited. Optionally, for a monocular camera, according to the feature point ...
Embodiment 2
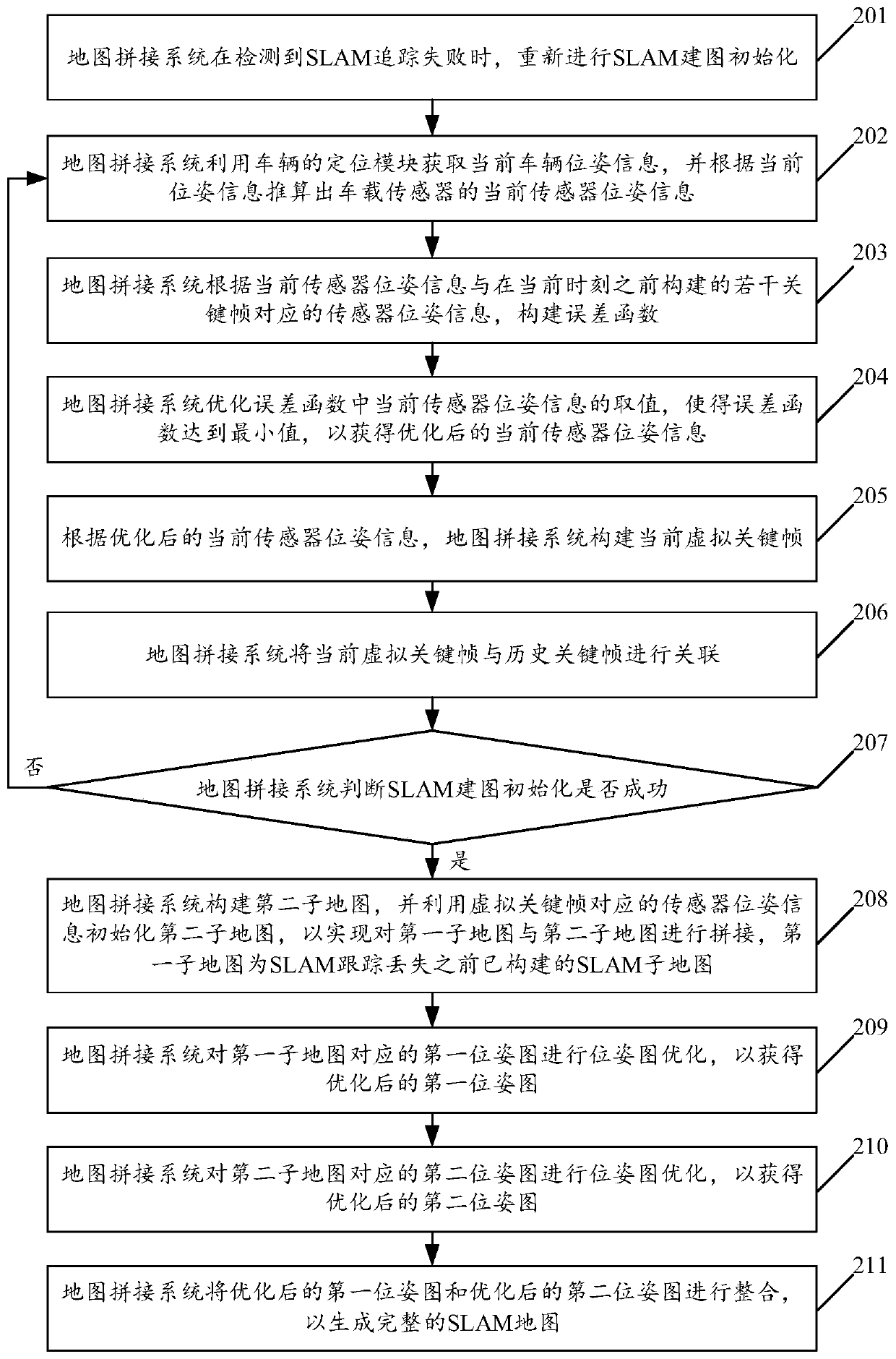
[0096] see figure 2 , figure 2 It is a schematic flowchart of another SLAM map stitching method disclosed in the embodiment of the present invention. like figure 2 As shown, the SLAM map stitching method may include the following steps.
[0097] 201. When the map stitching system detects that SLAM tracking is lost, it re-initializes SLAM mapping.
[0098] 202. The map stitching system uses the positioning module of the vehicle to obtain the current vehicle pose information, and calculates the current sensor pose information of the vehicle camera according to the current vehicle pose information.
[0099] 203. The map stitching system constructs an error function according to the current sensor pose information and sensor pose information corresponding to several key frames constructed before the current moment.
[0100] In the embodiment of the present invention, the several key frames constructed before the current moment may be at least two key frames in the first sub...
Embodiment 3
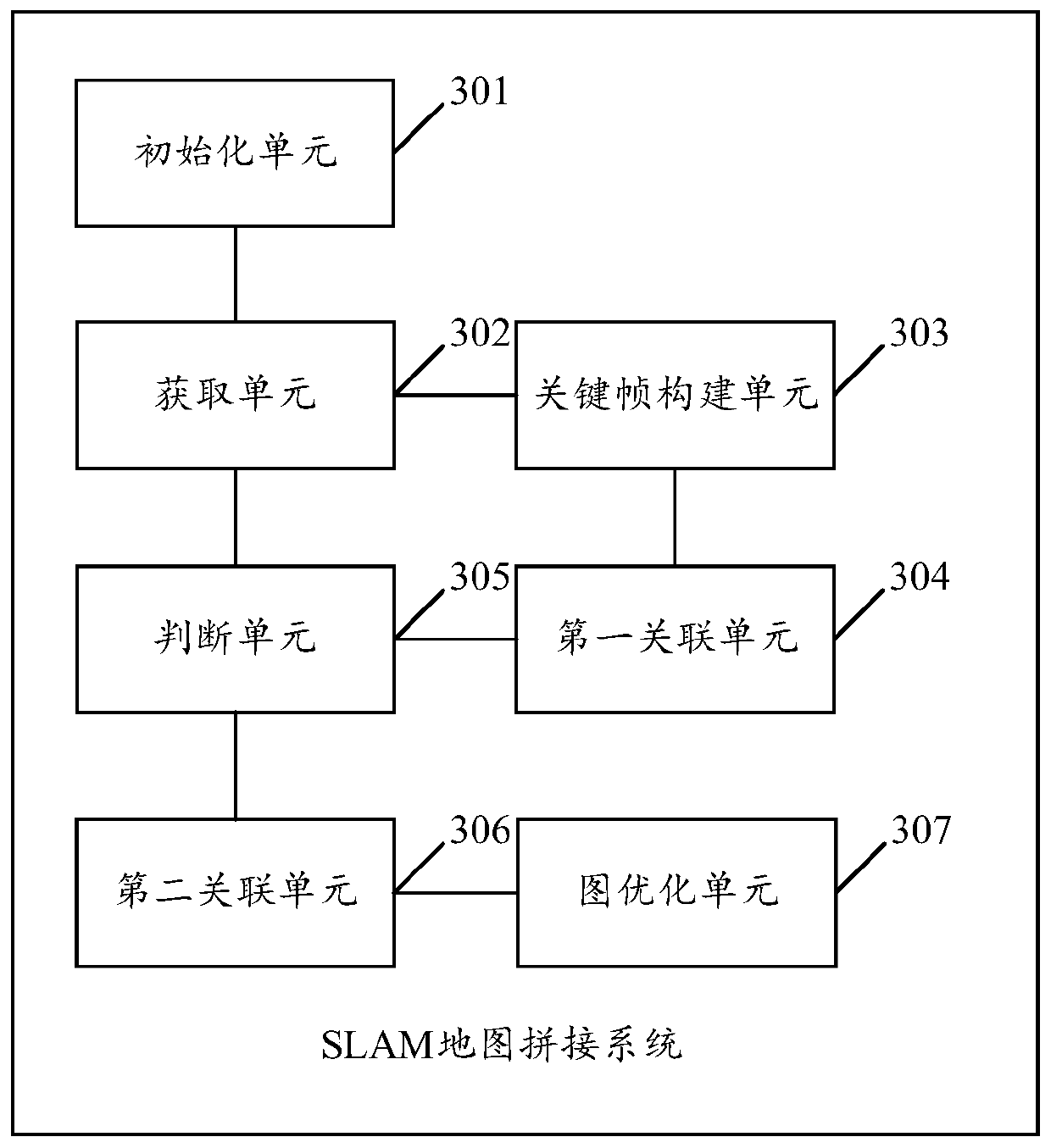
[0121] See 3, image 3 It is a schematic structural diagram of a SLAM map mosaic system disclosed in an embodiment of the present invention. like image 3 As shown, the SLAM map stitching system may include an initialization unit 301, an acquisition unit 302, a key frame construction unit 303, a first association unit 304, a judgment unit 305, a second association unit 306, and a graph optimization unit 307, wherein:
[0122] The initialization unit 301 is configured to re-initialize SLAM mapping when SLAM tracking loss is detected.
[0123] In the embodiment of the present invention, optionally, for visual SLAM mapping, the steps for initialization unit 301 to re-initialize SLAM mapping may specifically include:
[0124] The initialization unit 301 is configured to continuously collect image frames through the visual sensor, and perform feature point identification on the collected image frames; if the current image frame meets the requirement for the number of feature poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More