

A Unified Calibration Model of Robot Structural Parameters and Hand-eye Relationship
A technology of structural parameters and hand-eye relationship, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex conversion relations, low calibration accuracy, and many conversion times, so as to improve calibration accuracy, improve accuracy, and simplify calibration The effect of work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in conjunction with the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of the present invention.
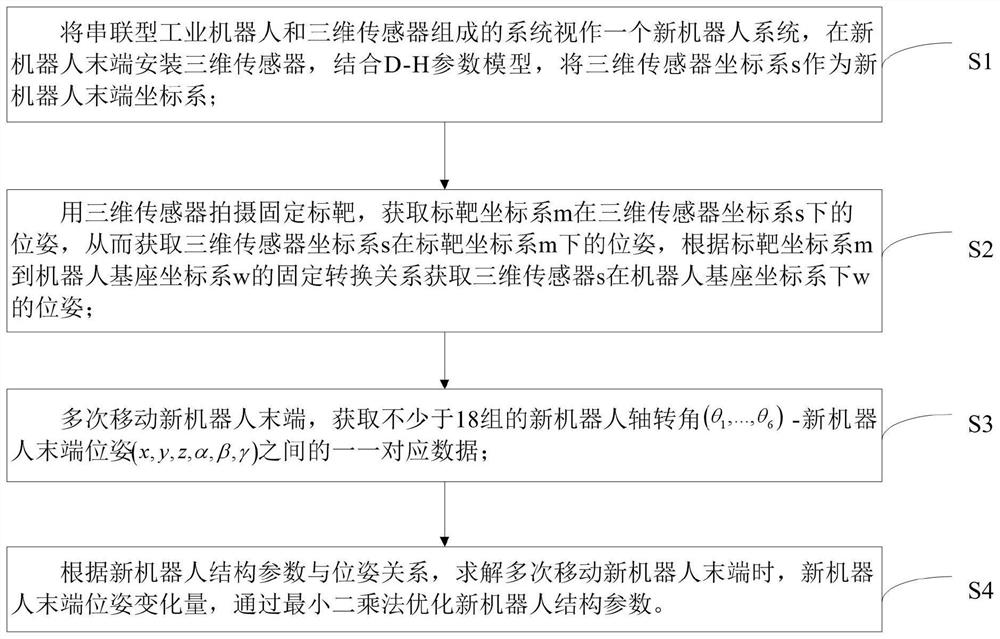
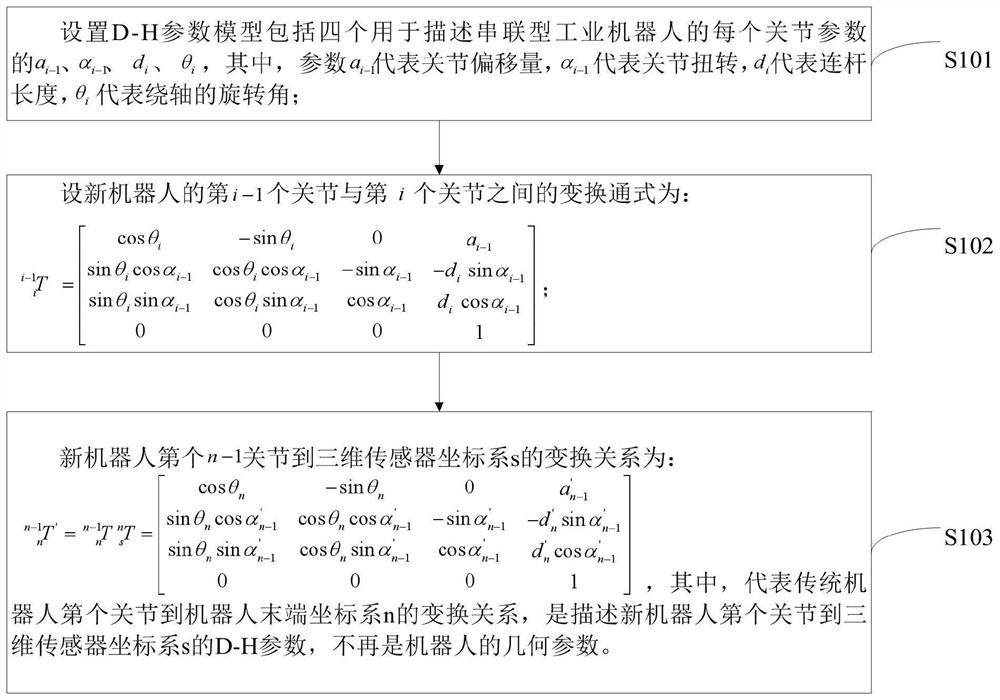
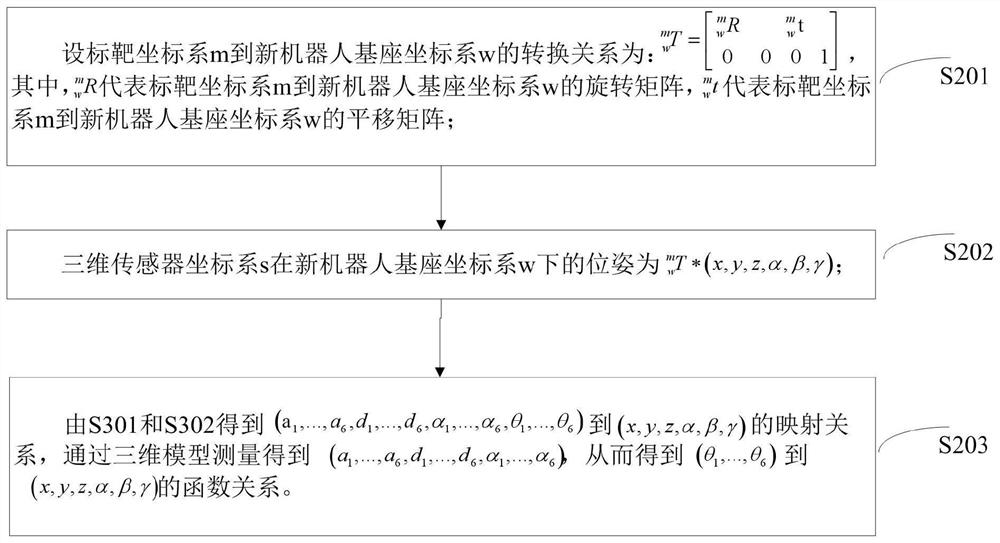
[0031] Taking a 6-DOF industrial robot as an example, in theory there is f(a 1 ,...,a 6 , d 1 ,...,d 6 ,α 1 ,...,α 6 ,θ 1 ,...,θ 6 )=(x, y, z, α, β, γ), but the robot structure parameters given by the robot manufacturer are not accurate in actual work, so we need to calibrate them. The traditional calibration method includes the following steps:
[0032] S5. Install a laser tracker at the end of the robot to obtain the pose of the end of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More