Navigation buoy detection and maintenance system
A maintenance system and navigation mark technology, applied in the field of navigation mark system, can solve the problems of high energy consumption, low efficiency, poor verification accuracy, etc., and achieve the effects of high maintenance efficiency, alleviation of transmission and storage pressure, and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
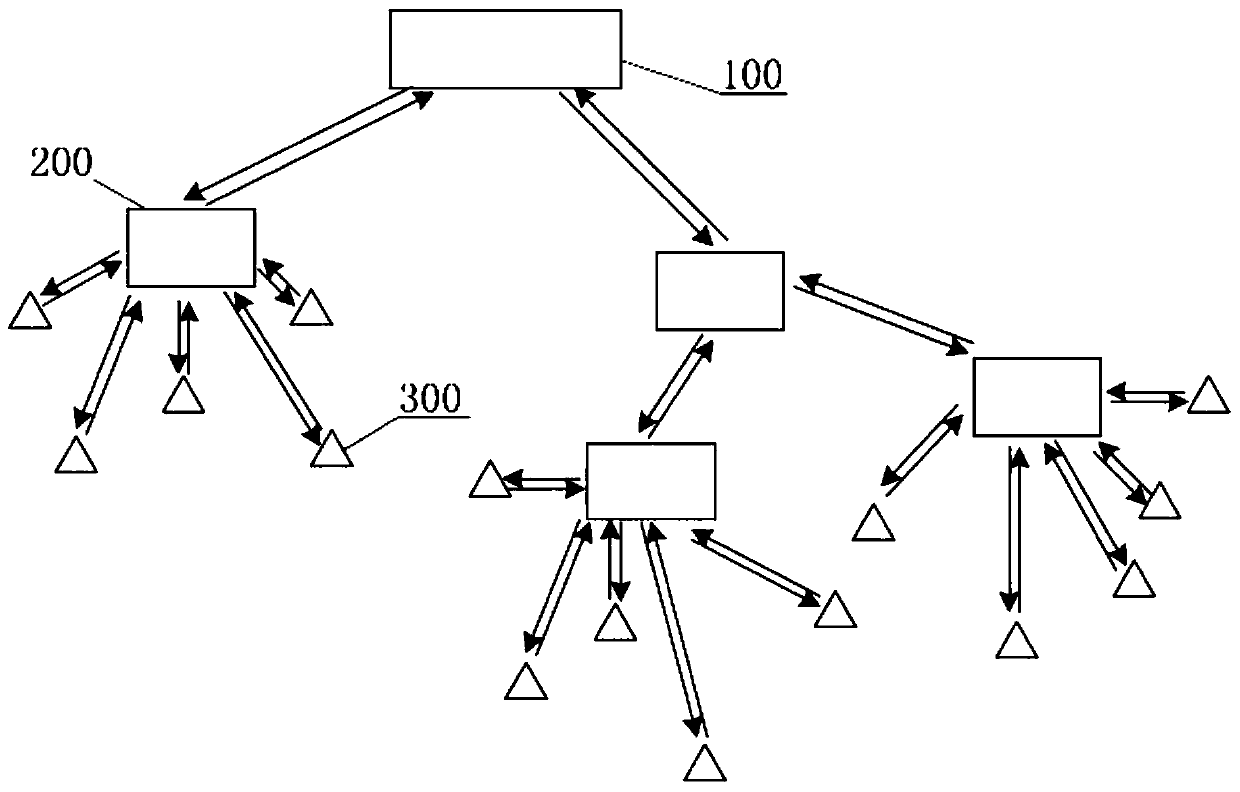
[0015] Specific implementation mode one: the following combination figure 1 and figure 2 This embodiment will be specifically described. In this embodiment, a navigation buoy detection and maintenance system includes a control console 100, a drone 200 and a navigation mark 300;
[0016] The navigation mark 300 is equipped with a GPS positioning device, and the GPS positioning device is used to send a position signal of the navigation mark 300 to the drone 200;
[0017] The UAV 200 is provided with a navigation mark 300 position verification device and an image acquisition device, and the navigation mark 300 position verification device compares the position information of the navigation mark 300 stored by itself with the position information sent by the GPS positioning device, and determines the position of the navigation mark 300. With or without offset, the image acquisition device is used to acquire the image of the navigation mark 300;
[0018] The control center 100 c...
specific Embodiment approach 2
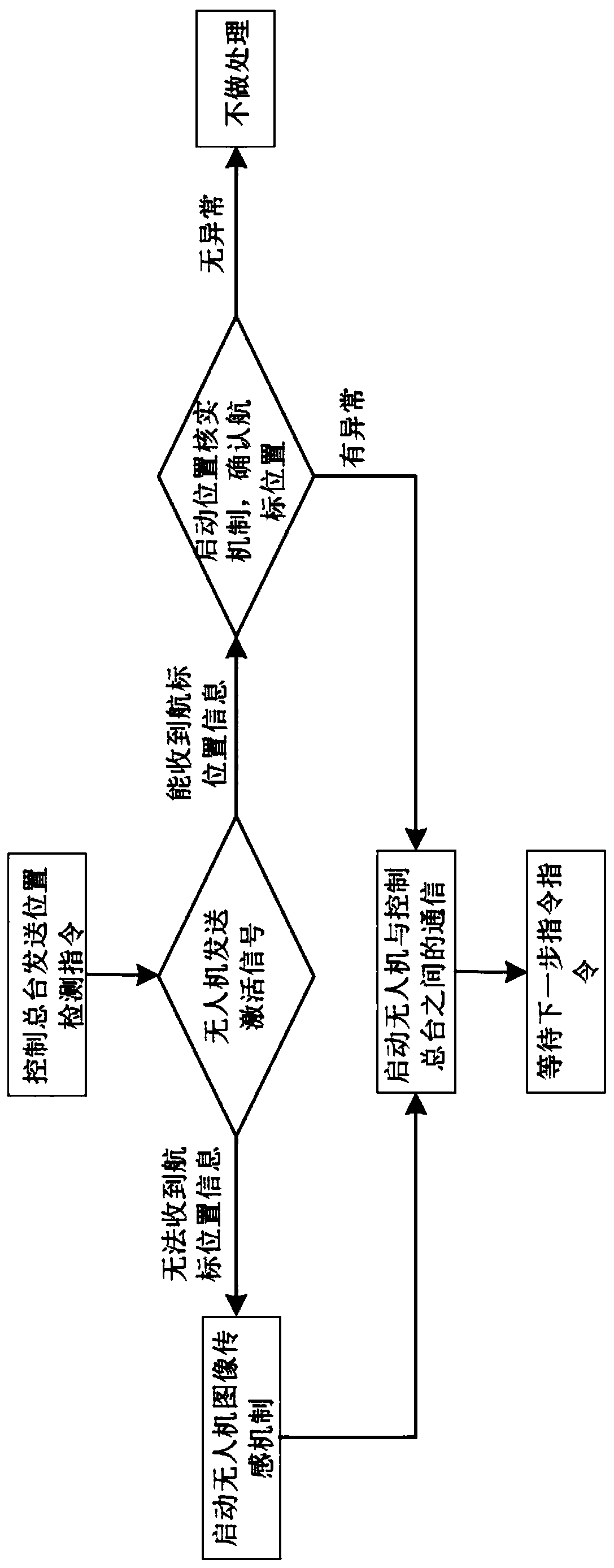
[0022] Embodiment 2: This embodiment is a further improvement to Embodiment 1. The difference between this embodiment and Embodiment 1 is that the navigation mark 300 is also equipped with an activation device, and the activation device is controlled according to the signal of the UAV 200. Turn on or off the GPS positioning device.
[0023] When there is no drone 200 patrolling, the GPS positioning device is in a low-power dormant state; when the drone 200 is patrolling, the drone 200 transmits a signal to the navigation mark 300 according to the approximate coordinates, and at this time, the activation device on the navigation mark 300 turns on the GPS after receiving the signal The positioning device starts to work and sends the position coordinates to the UAV 200, which further saves energy,
specific Embodiment approach 3
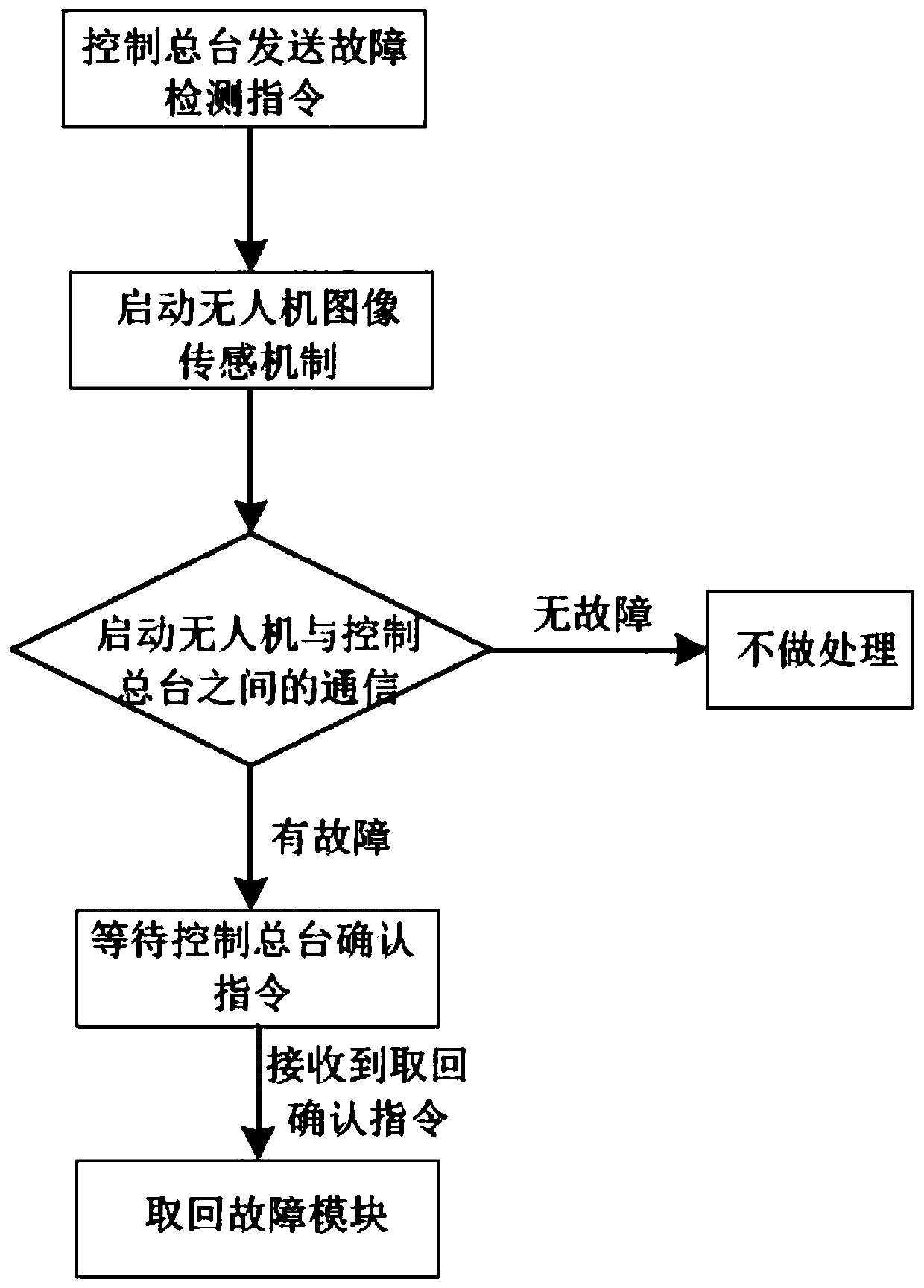
[0024] Embodiment 3: This embodiment is a further improvement on Embodiment 1. The difference between this embodiment and Embodiment 1 is that there is also a controller on the drone 200, and the controller is used to control the unmanned The flight status of the aircraft 200 is periodically sent to the control console 100.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More