

Underactuation crane operating whole process active-disturbance-rejection control method of single parameter adjustment
A technology of active disturbance rejection control and active disturbance rejection controller, which is applied in the directions of load suspension components, transportation and packaging, etc., can solve the problems of difficult popularization and application, increased cost of installing speed sensors, and difficulty in load swing angular velocity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific implementation methods.
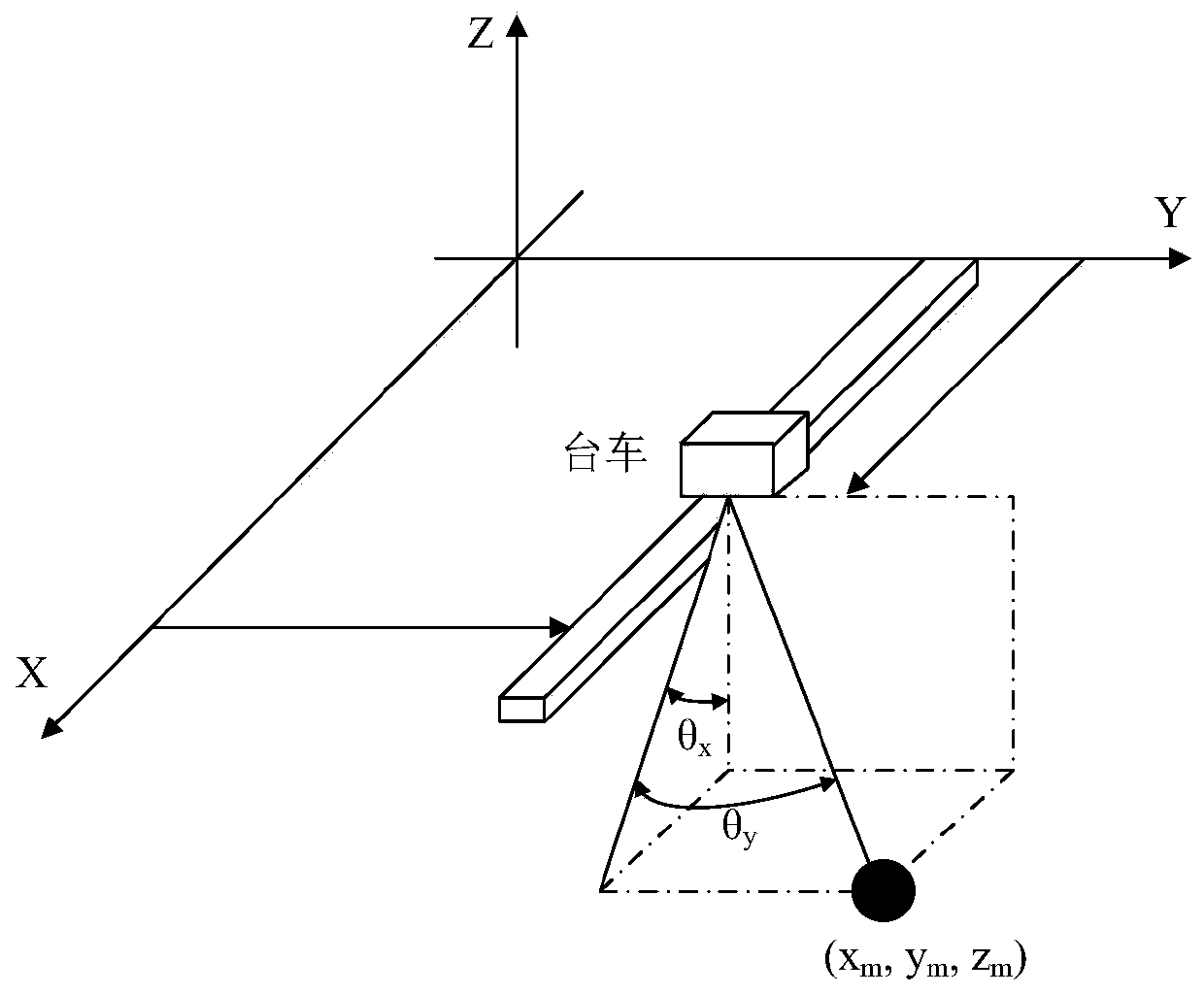
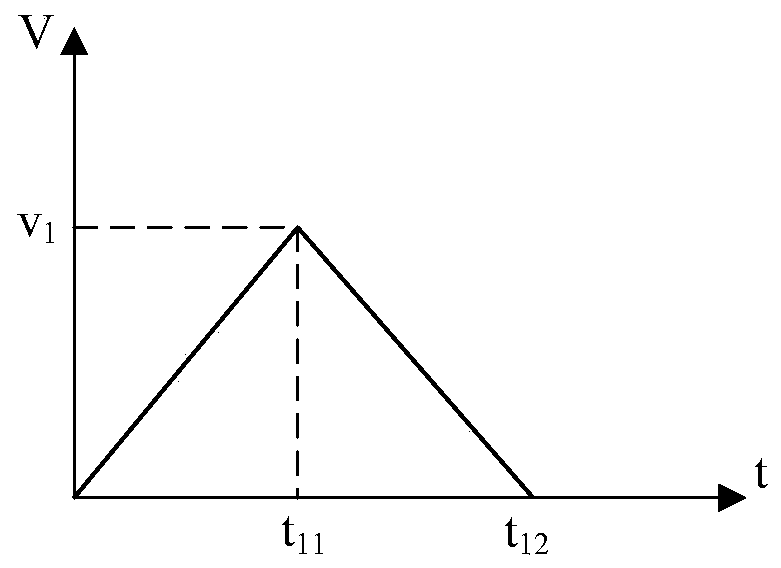
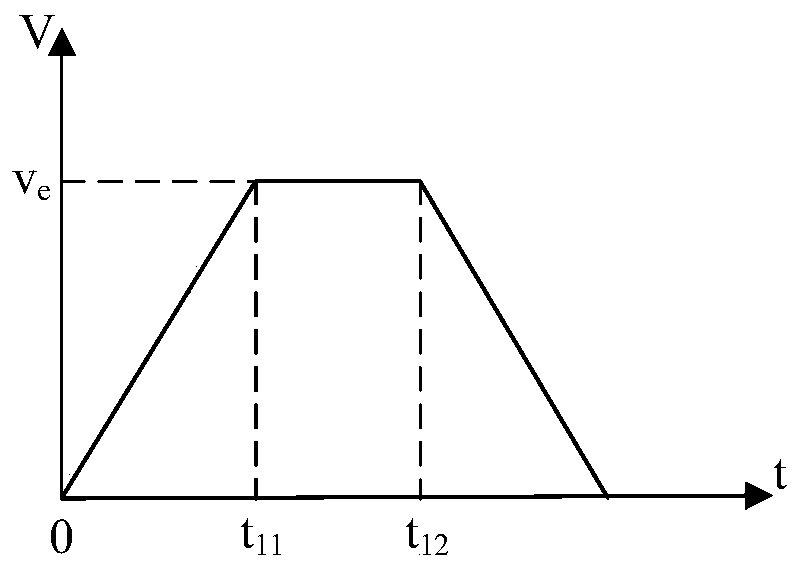
[0060] The basic idea of the active disturbance rejection control method for the whole process of underactuated crane operation of the present invention is: firstly, according to the motion characteristics of the underactuated crane, establish the state equation of the underactuated crane, and then, according to the starting and target positions of the trolley, consider the According to the safety constraints such as speed, acceleration and operating environment, the ideal operating trajectory of the trolley with priority on efficiency is generated, and compared with the actual position of the trolley, an error feedback control law for the movement of the trolley is constructed. Considering that uncertain factors such as rope length, l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More