

Unmanned aerial vehicle cluster collaborative obstacle avoidance-reconstruction processing method
A processing method and unmanned aerial vehicle technology, applied in the direction of three-dimensional position/channel control, etc., can solve problems such as strong randomness, achieve the effect of simplifying the calculation process, loose optimization problem requirements, and strong global optimization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
[0036] The application principle of the present invention will be described in detail below with reference to the accompanying drawings.
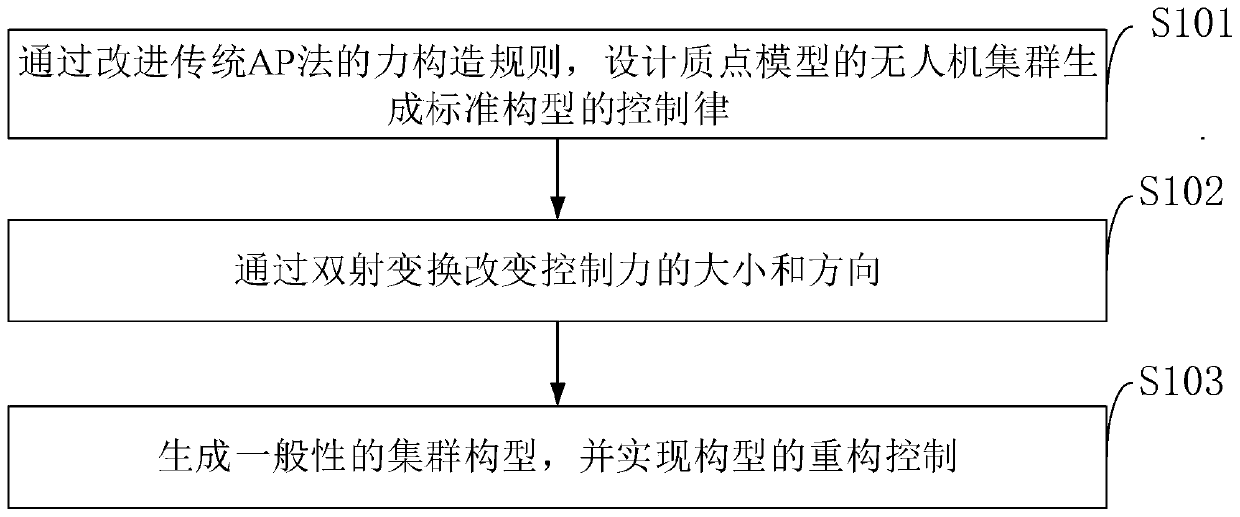
[0037] Such as figure 1 As shown, the UAV cluster cooperative obstacle avoidance-reconstruction processing method provided by the embodiment of the present invention includes the following steps:
[0038] S101, by improving the force construction rules of the traditional AP method, design the UAV cluster of the particle model to generate a standard configuration control law;
[0039] S102, changing the magnitude and direction of the control force through bijection transformation;
[0040] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More