

Coordinated local path planning method based on V2X communication and binocular vision
A technology of local path planning and binocular vision, which is applied in services based on location information, services based on specific environments, communications between vehicles and infrastructure, etc. information and environmental perception information, and other issues such as low reliability, to achieve the effect of improving reliability, reducing computing load, and expanding the range of perception
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0045] The technical scheme that the present invention solves the problems of the technologies described above is:
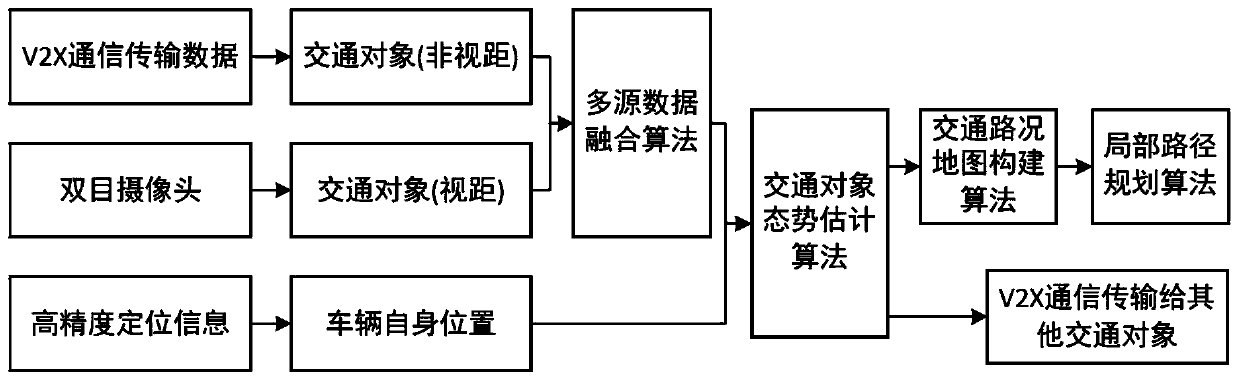
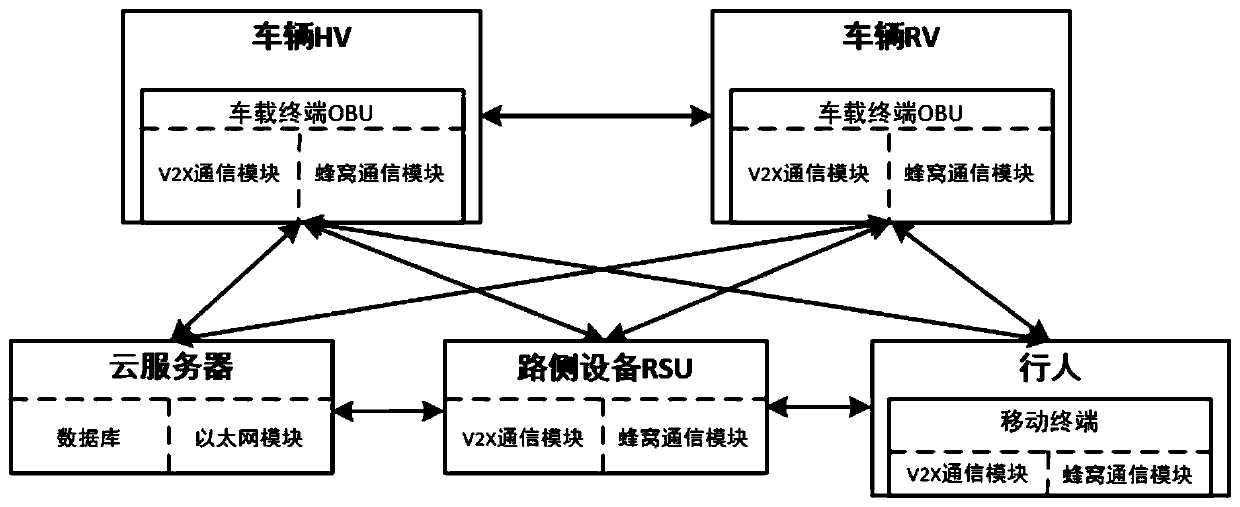
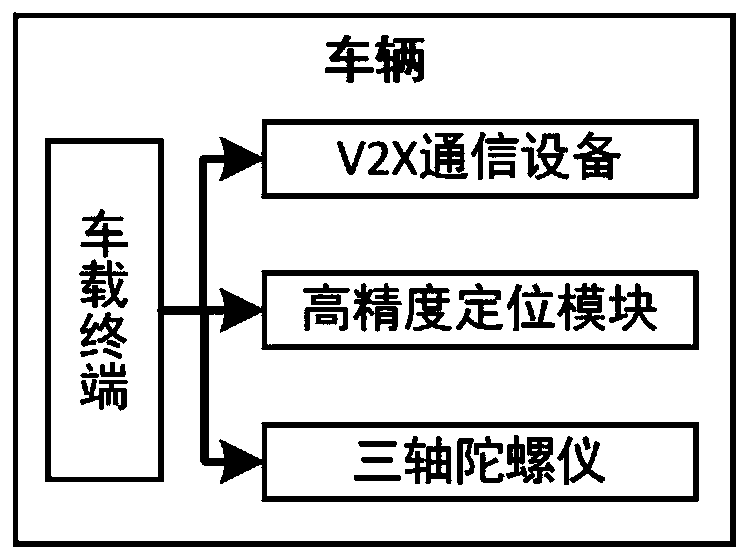
[0046] A collaborative local path planning method based on V2X communication and binocular vision, such as figure 1 Shown is the overall architecture diagram of the method, which is mainly controlled by the vehicle-mounted terminal (OBU), roadside unit (RSU), cloud server, mobile terminal, OBD device, vehicle central control device, binocular camera, and cooperative local path planning device complete, figure 2 Shown is the framework diagram of V2X communication. Among them, the OBU device on the host vehicle HV (Host Vehicle) is the information collection center for local path planning,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More