

Target point positioning navigation system and method
A technology for positioning navigation and target point, which is applied in the field of target point positioning and navigation system, can solve the problems of inaccurate positioning, complicated and time-consuming operation, and the markers are easy to block each other, so as to ensure the detection effect, the operation is simple, and the operation of ultrasonic positioning is convenient. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
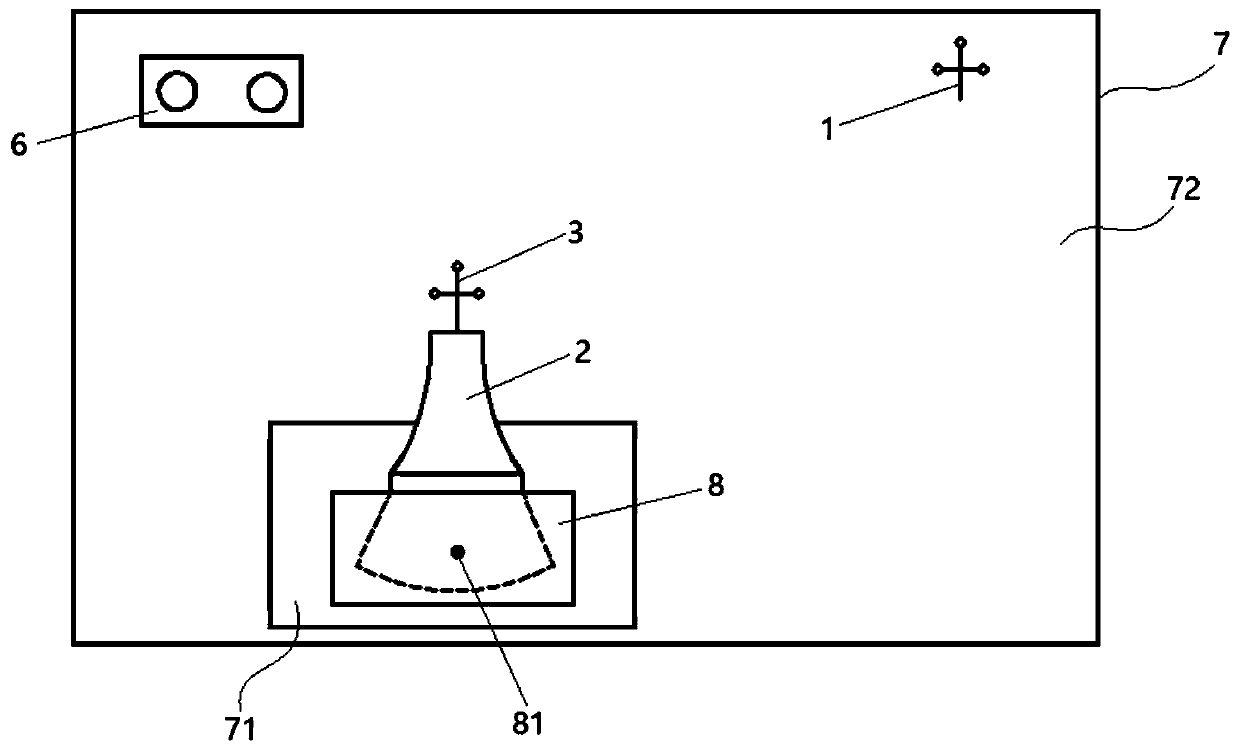
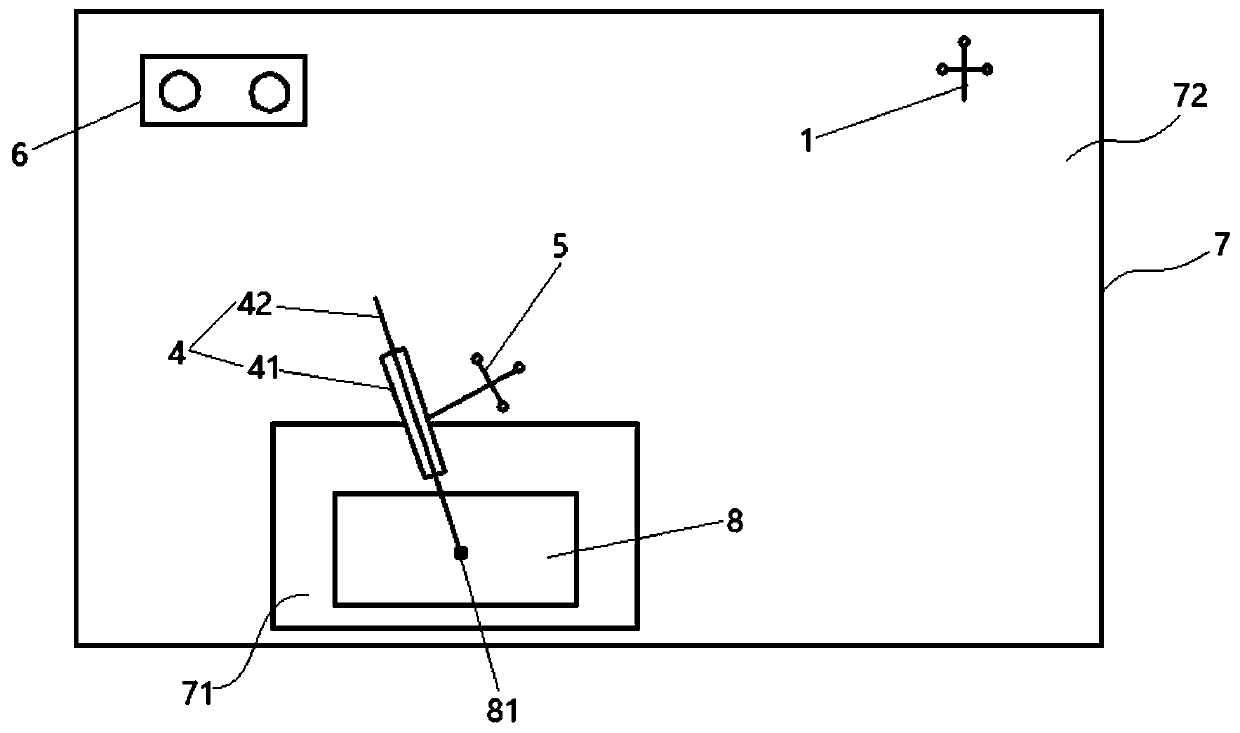
[0033] Such as figure 1 and figure 2 As shown, the target point positioning and navigation system provided by Embodiment 1 of the present invention includes a penetrating device, a positioning device and a navigation control device. The navigation control device includes a first marker 1 and a processing device. The positioning device includes a detection device 2 and is arranged on The second marker 3 on the detection device 2, the detection device 2 is in contact with the base object 8, and is used to determine the relative positional relationship between the target point 81 in the base object 8 and the second marker 3, and the processing device passes the first marker 1 and the second marker 3 The relative positional relationship between the second marker 3 determines the relative positional relationship between the target point 81 and the first marker 1, the penetrating device includes the probe rod assembly 4 and the third marker 5 arranged on the probe rod assembly 4, a...
Embodiment 2
[0049] When the target point positioning and navigation system of Embodiment 2 of the present invention is applied to the B-ultrasound positioning and puncture system of medical equipment, the detection equipment can use a B-ultrasound probe, the probe rod is a puncture needle, the basic object is the punctured body, and the target point is the punctured body the puncture point. The second marker is fixed on the B-ultrasound probe, and the puncture point in the punctured body is determined by the B-ultrasound probe, so as to calculate the spatial position of the puncture point relative to the second marker, and the processing device passes the first marker and the second marker The relative spatial position of the puncture point is calculated relative to the first marker. The third marker is fixed on the outer sleeve of the puncture needle. The processing device calculates the puncture point through the spatial position of the first marker and the third marker. The spatial pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More