

Eyebrow penciling robot system based on robot vision and control method thereof
A robot system, robot vision technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of low precision, rough movement, low flexibility and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] Further description will be made below in conjunction with the accompanying drawings.
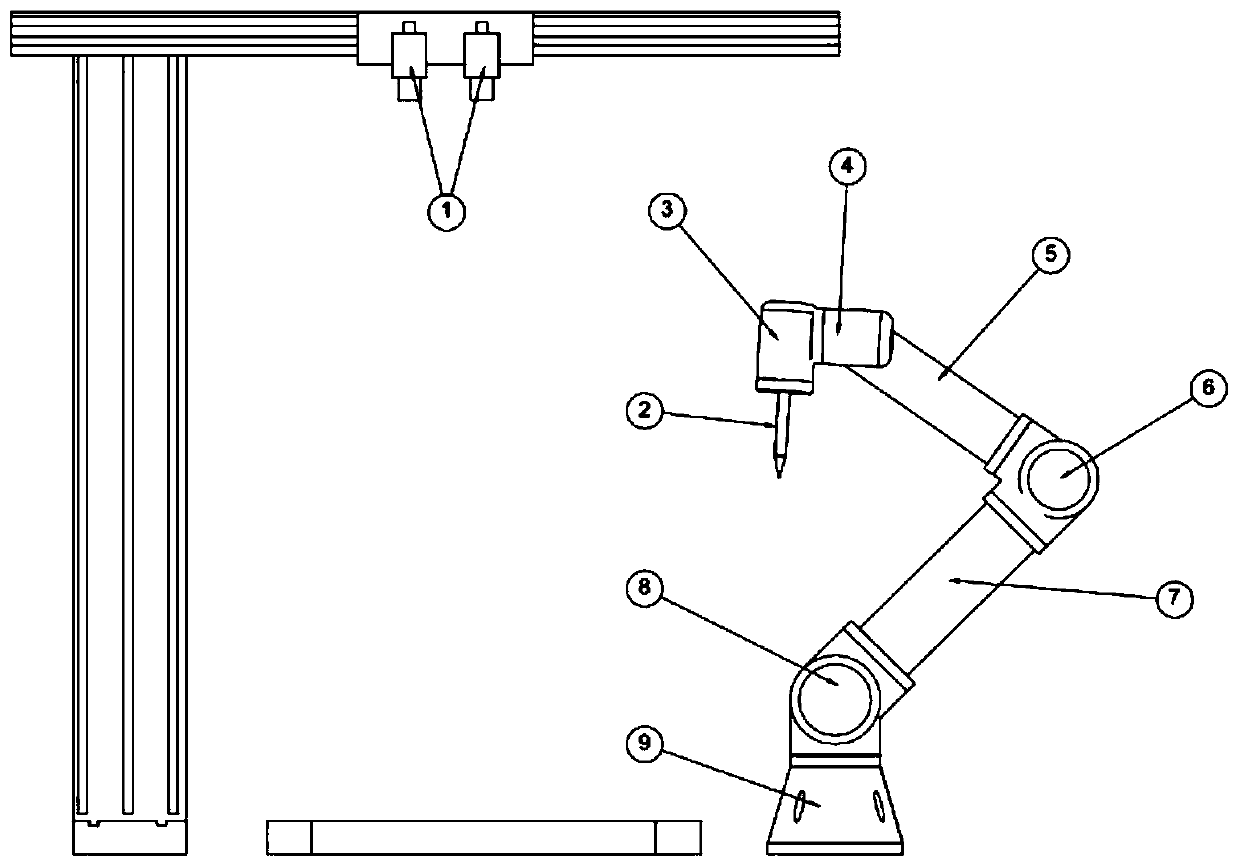
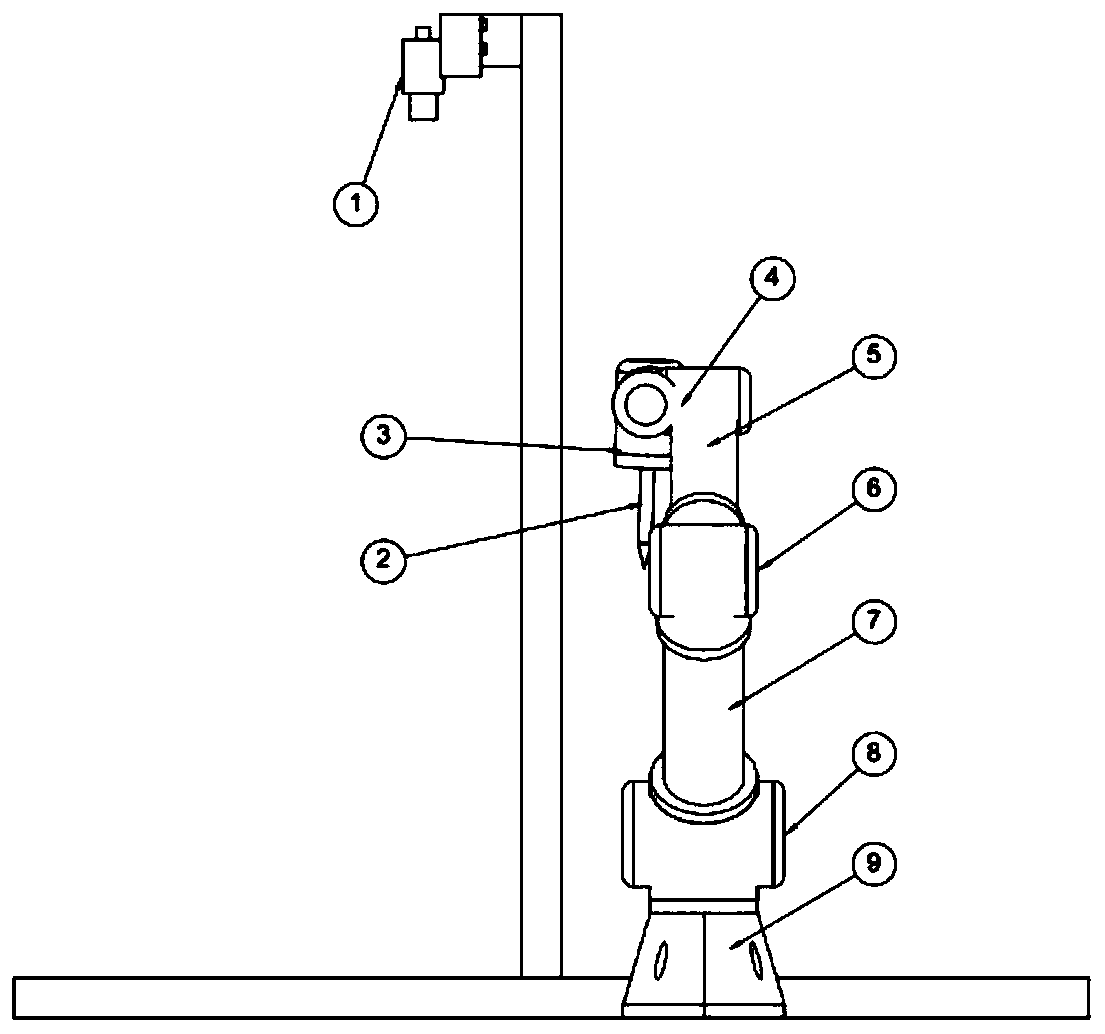
[0079] figure 1 , figure 2 Shown is a thrush robot system based on 6 degrees of freedom mechanical arm and binocular vision, a kind of thrush robot system based on robot vision, it includes 6 degrees of freedom mechanical arm, eyebrow pencil 5, binocular camera 1 and computer, 6 The DOF robotic arm is connected to the computer through a network cable, the binocular camera is connected to the computer through a USB cable, and the eyebrow pencil is fixed at the end of the 6DOF robotic arm. The 6-DOF manipulator can use the UR3 manipulator produced by Universal Robots, Denmark, which is a high-precision manipulator with six degrees of freedom. Including: the first wrist 3, the second wrist 4, the first connecting rod 5, the elbow 6, the second connecting rod 7, the shoulder 8, and the base 9. The binocular camera 1 can adopt the binocular camera of the MV-GE300C model produced by Ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More