

Underwater observation robot and control method
An underwater observation and robot technology, applied in the field of robots, can solve the problems of complex structure, difficult equipment, high seabed pressure, etc., and achieve the effects of improving transmission rate, convenient equipment maintenance, and optimizing control and adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
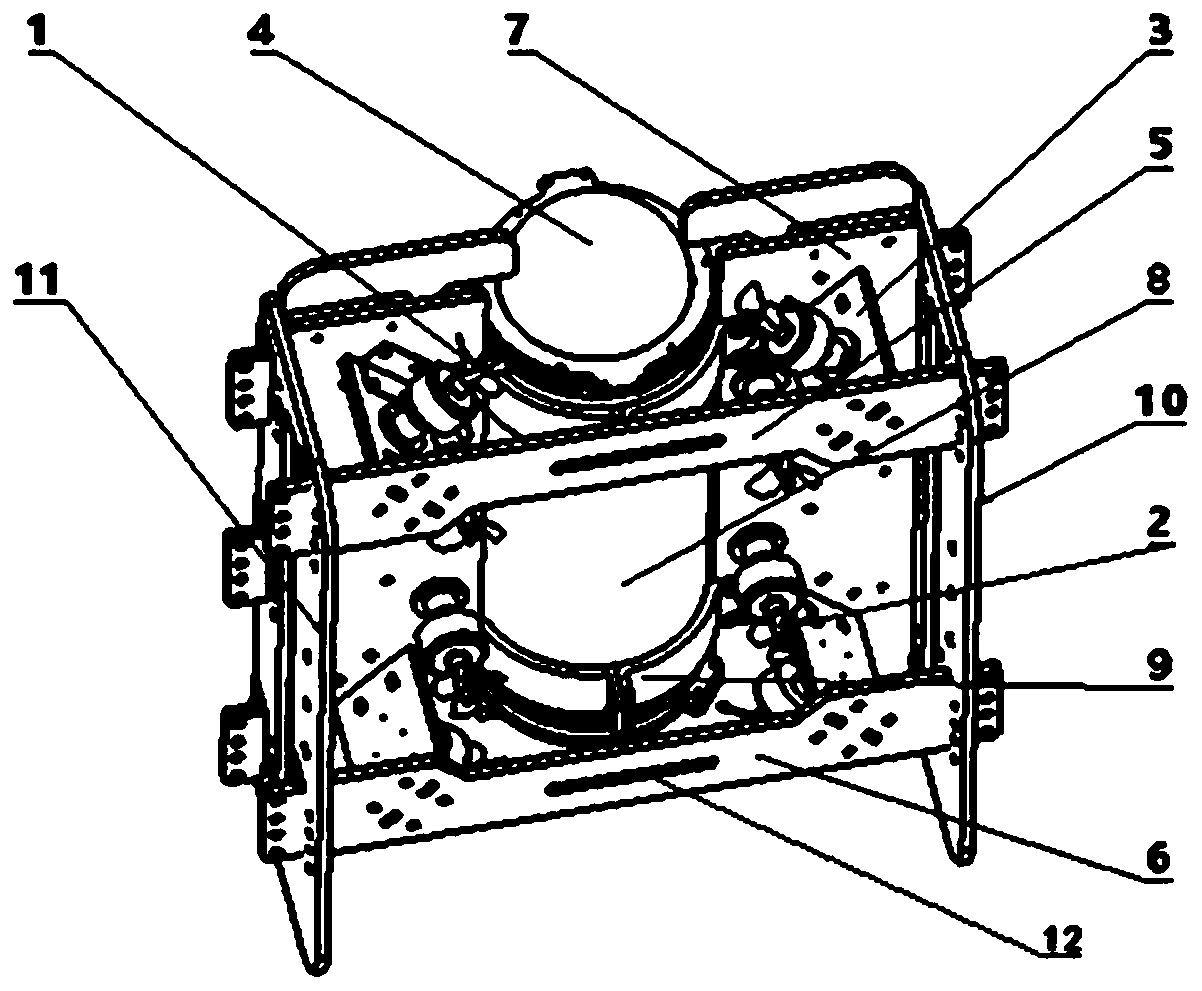
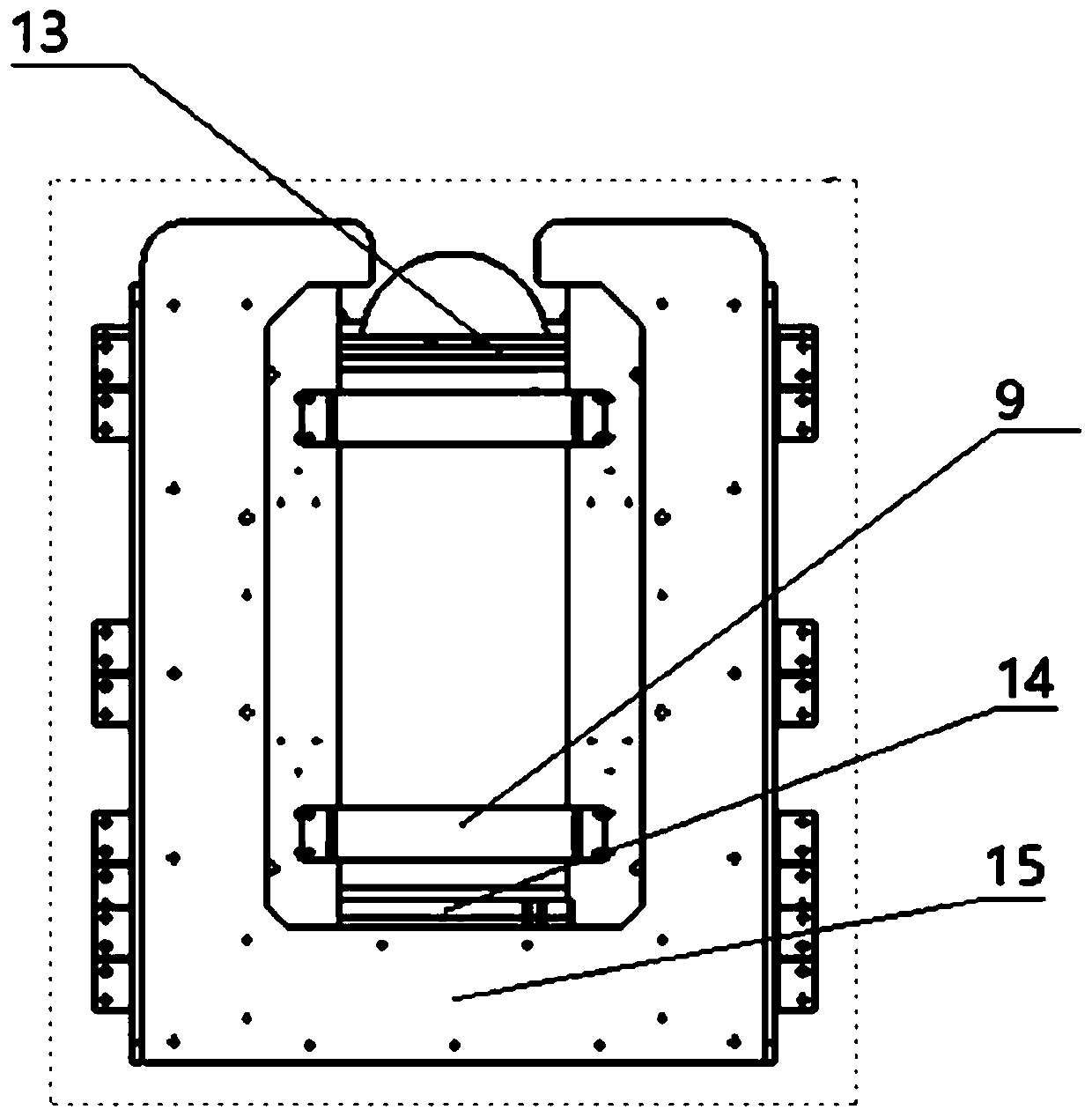
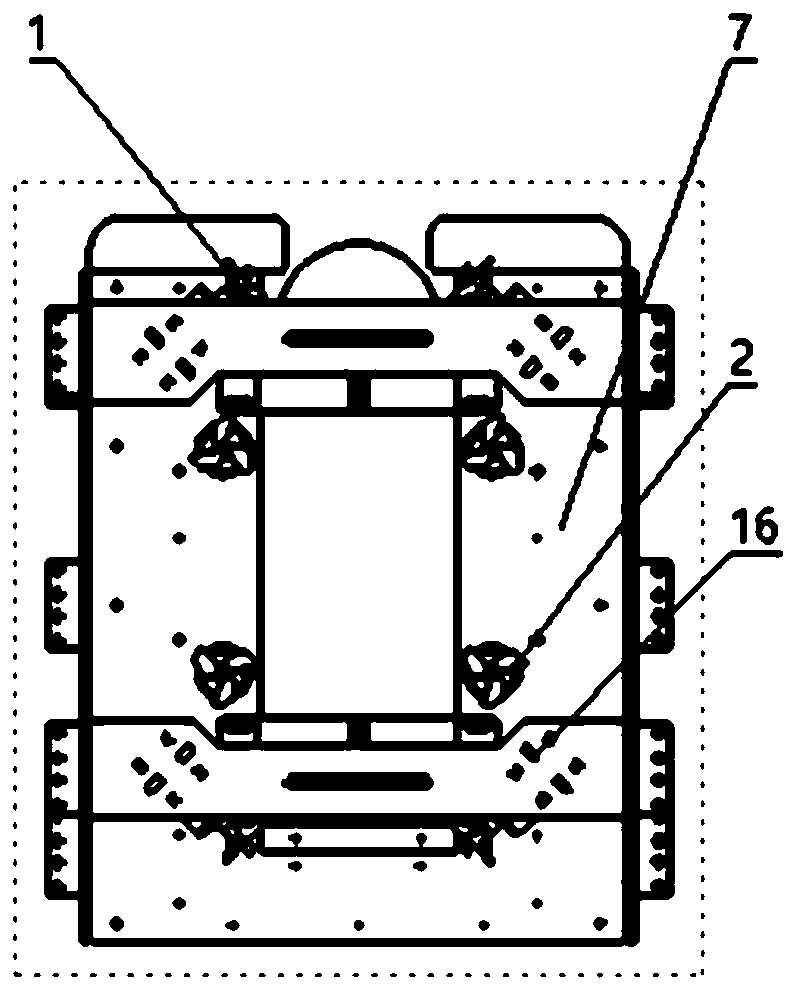
[0046] This embodiment provides an underwater observation robot, including a platform main body, an observation device, a transmission device, and a control device. One end of the transmission device is connected to a user terminal, and the other end is connected to the observation device and the control device respectively. The control device Connected to the main body of the platform,
[0047] In this embodiment, the platform body includes a sealed cabin, a plurality of underwater propellers and a drive motor, the sealed cabin is arranged on the platform main body, the drive motor drives the underwater propeller to rotate, and the propeller drives the underwater observation robot The mobile device also includes a depth detection device, and the depth detection device transmits the measured depth data to the user terminal through the transmission device. The observation device includes a camera and an illumination module, and the observation device is arranged in the airtight...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More