

Tracking and real-time obstacle avoidance reaction planning algorithm applied to industrial robot
An industrial robot and obstacle avoidance technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as difficulty in obtaining gradients, achieve the effects of avoiding singularity problems, reducing computational complexity, and improving computational efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The goal of this algorithm is to realize the optimal control of path planning for multi-degree-of-freedom industrial robots.
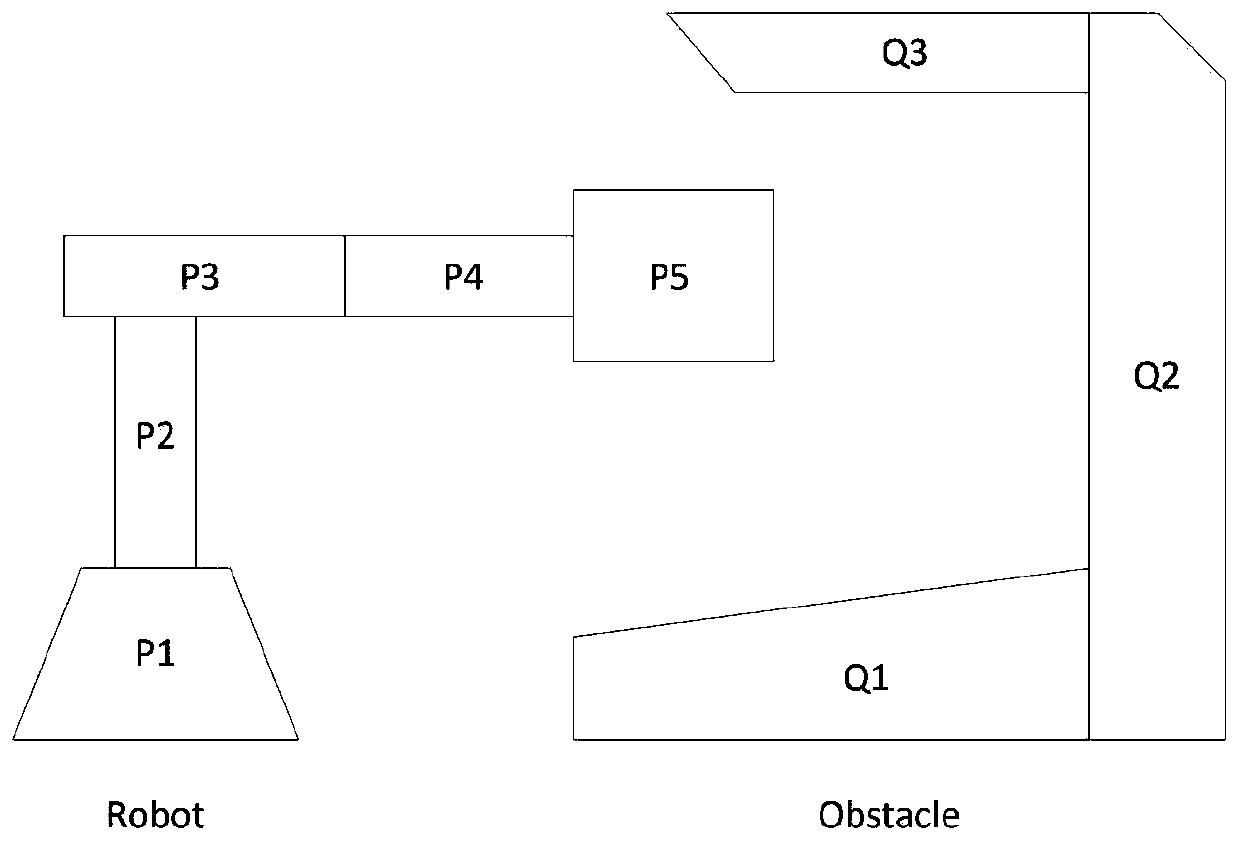
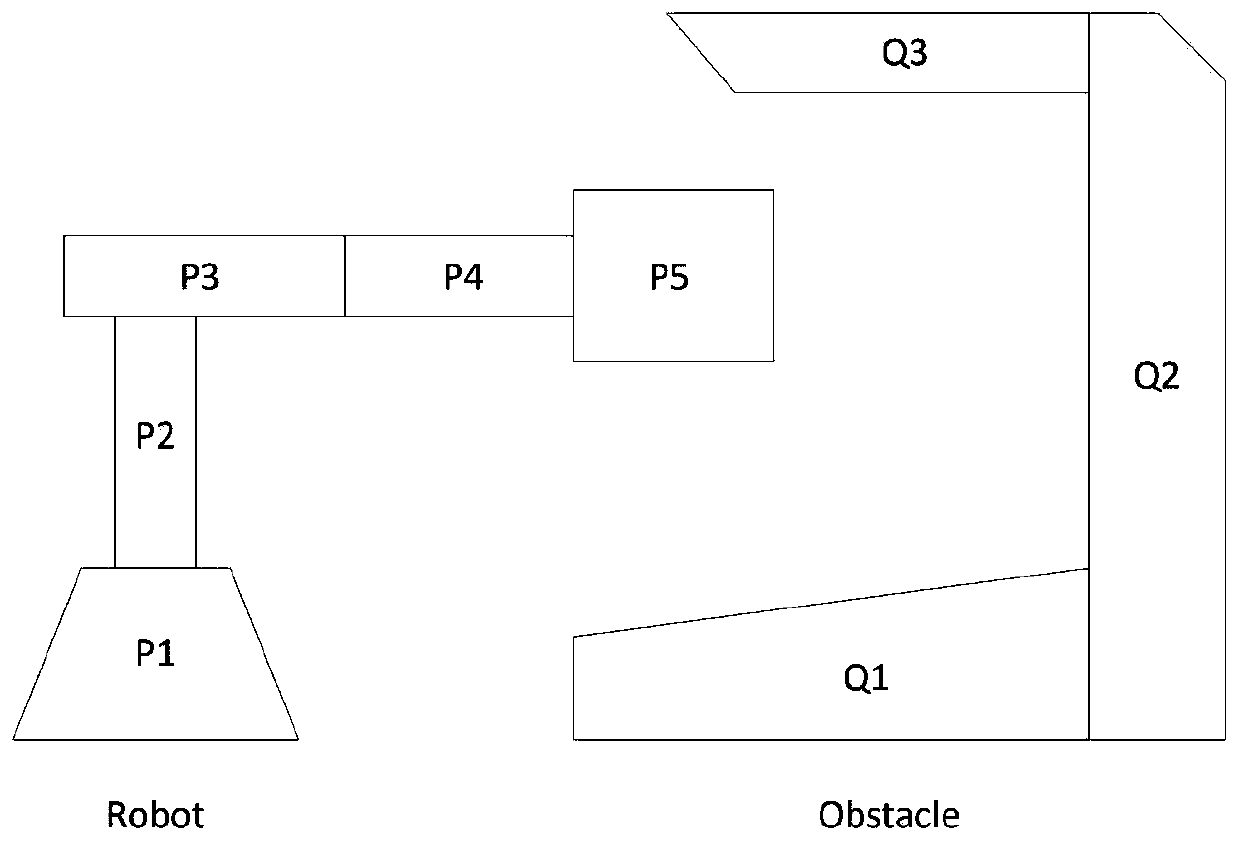
[0019] The input information of this algorithm: various parameters of the robot (including joint angle constraints), static obstacle (convex polyhedron) information, the initial state and termination state of the robot and the initial value of the optimization problem, the optimization goal (the most energy-saving or the most time-saving ).
[0020] The output information of this algorithm: the control torque and joint angle on each joint satisfying the constraints and optimization objectives.
[0021] The technical idea of this algorithm:
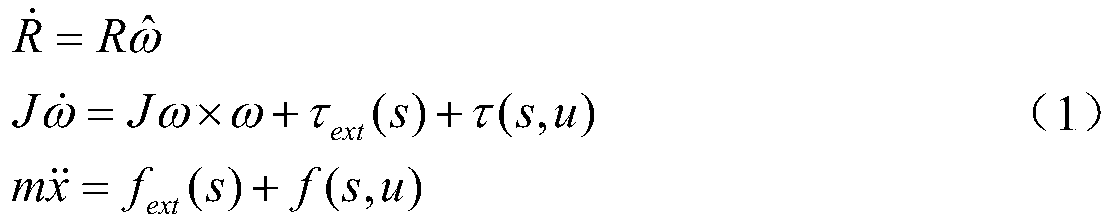
[0022] Sequential quadratic programming (SQP) is used to solve the optimal path planning problem of n-link industrial robots, and the geometric invariant algorithm of robot dynamics and the corresponding Hamel variational integral are obtained by applying the Lie group theory of robot dynamics. The "face...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More