

Autonomous navigation and obstacle avoidance unmanned aerial vehicle of laser radar and depth camera fusion
A technology of laser radar and depth camera, which is applied in the field of navigation drones, can solve the problems of unfavorable mobile device positioning and obstacle avoidance applications, the inability to independently realize the obstacle avoidance function, and the inability to detect, so as to overcome the limitations of multiple superposition, overcome the The effect of excessive equipment weight and light operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
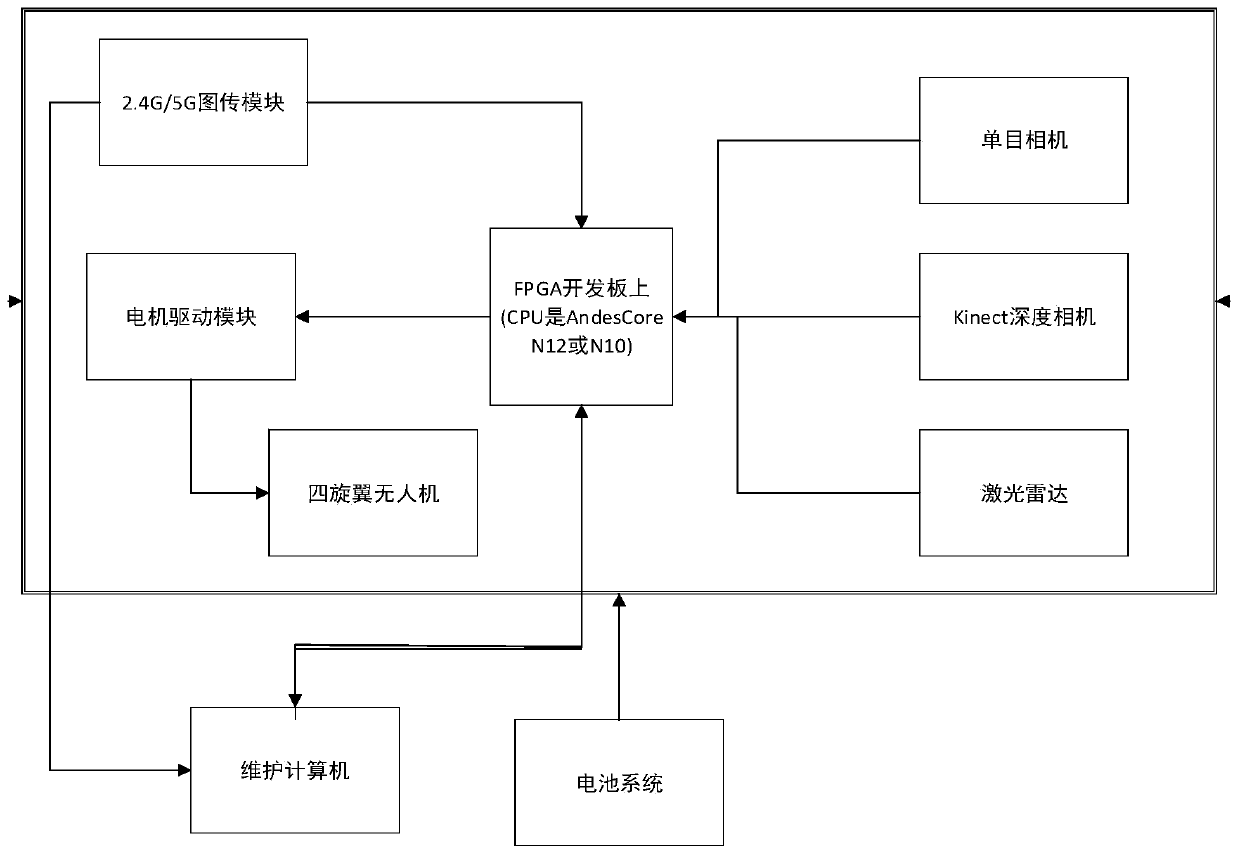
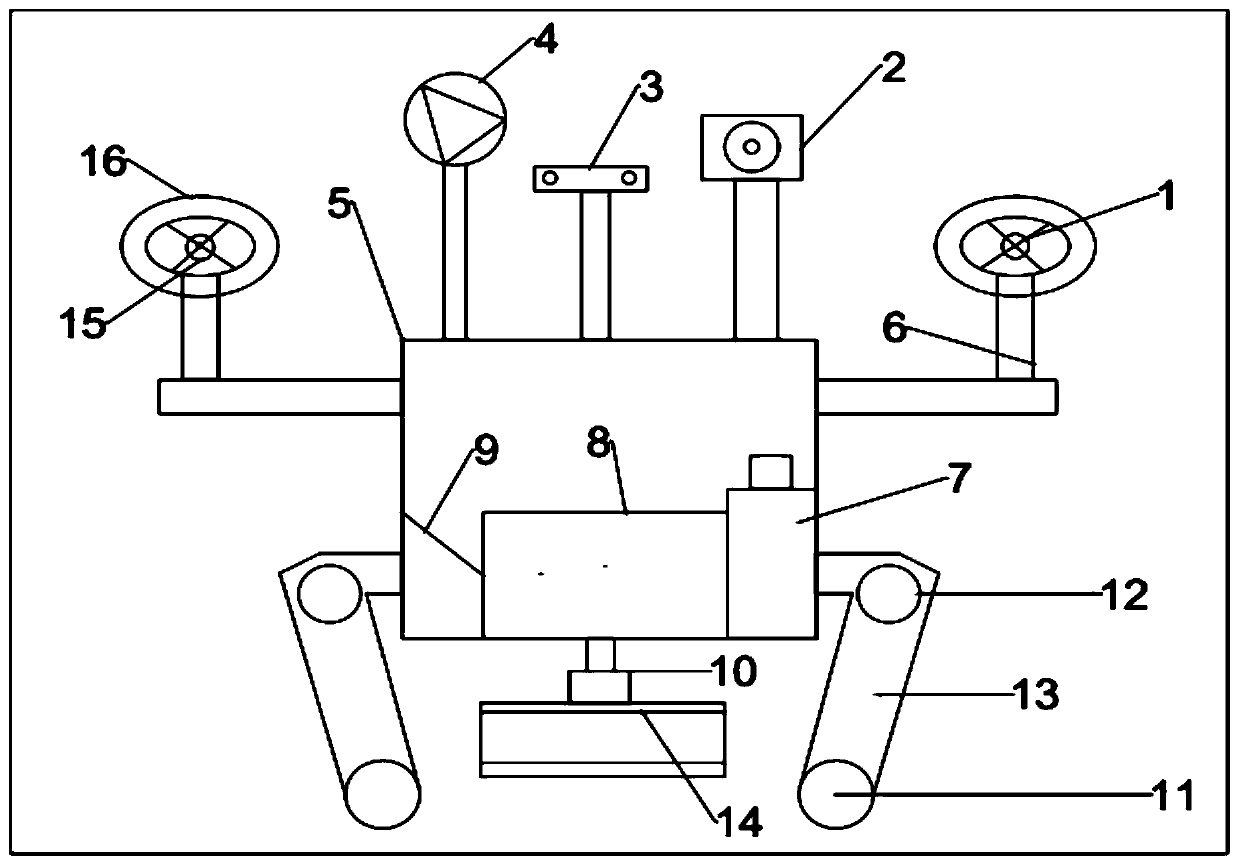
[0029] Such as image 3 As shown, an autonomous navigation and obstacle avoidance UAV fused with a laser radar 14 and a depth camera 3 includes a drone body 5, a rotor 1, a depth camera 3 and a control system 8, and also includes a laser radar 14 and a monocular camera. 2. The depth camera 3, the monocular camera 2 and the laser radar 14 are connected to the control system 8. The control system 8 analyzes the data recorded by the three, generates an obstacle avoidance route, and controls the UAV to avoid obstacles.
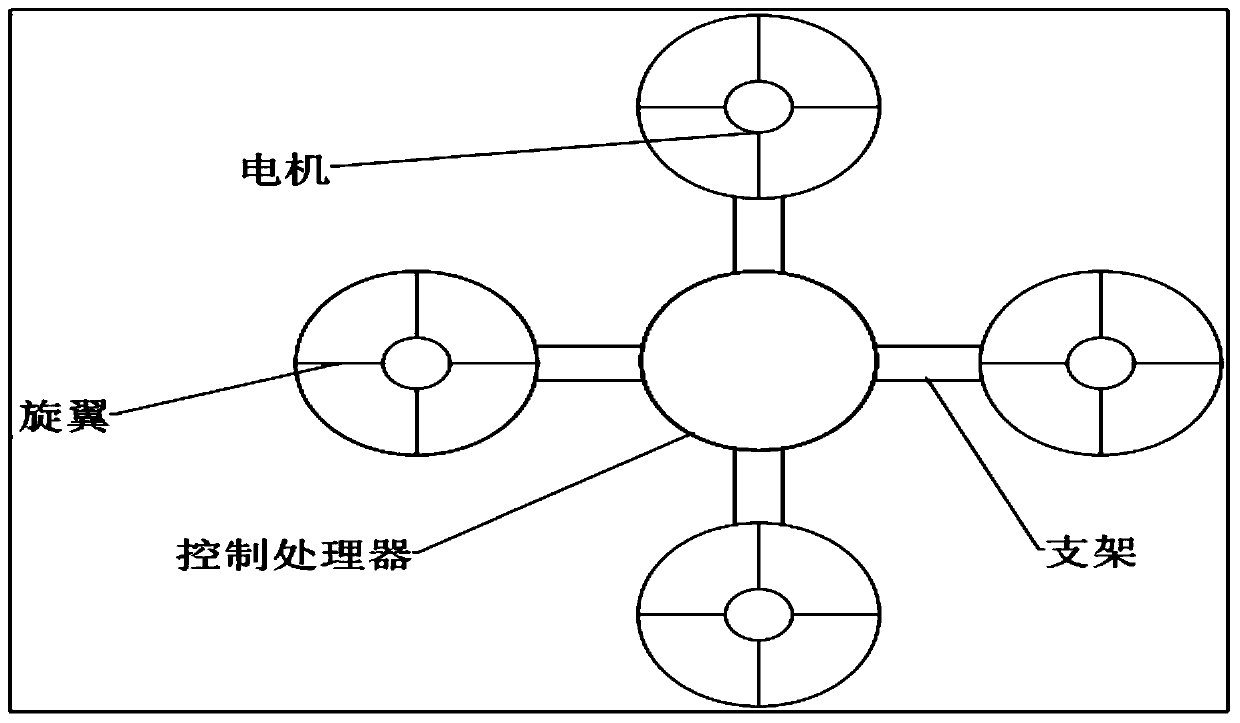
[0030] The power system of the invention is as figure 2 As shown,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More