Stability determination method of absolute value system based on double-sine input description function
A technology for describing functions and determining methods, which is applied in electrical digital data processing, special data processing applications, instruments, etc., to achieve the effects of wide application range, accurate judgment, and strong operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
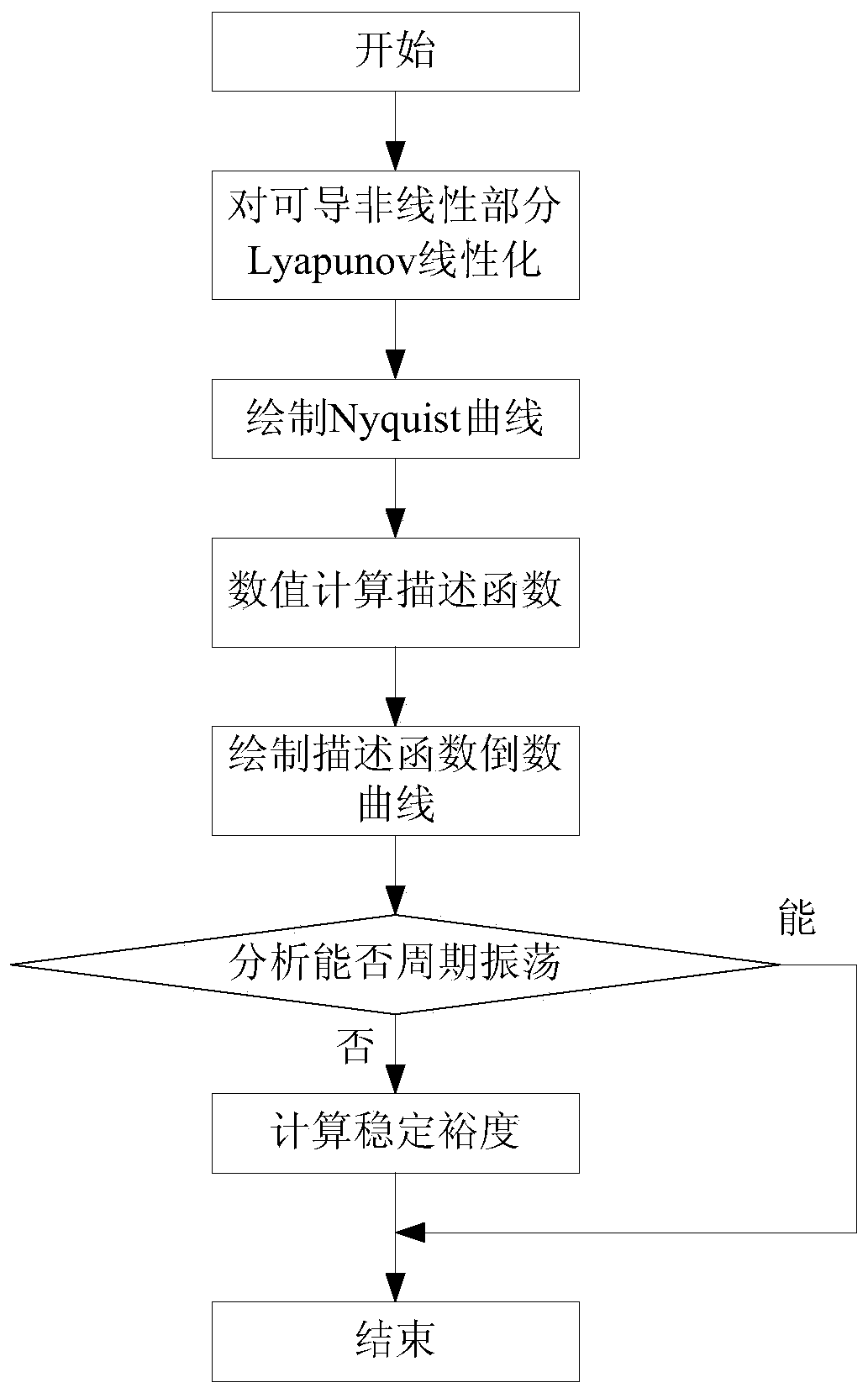
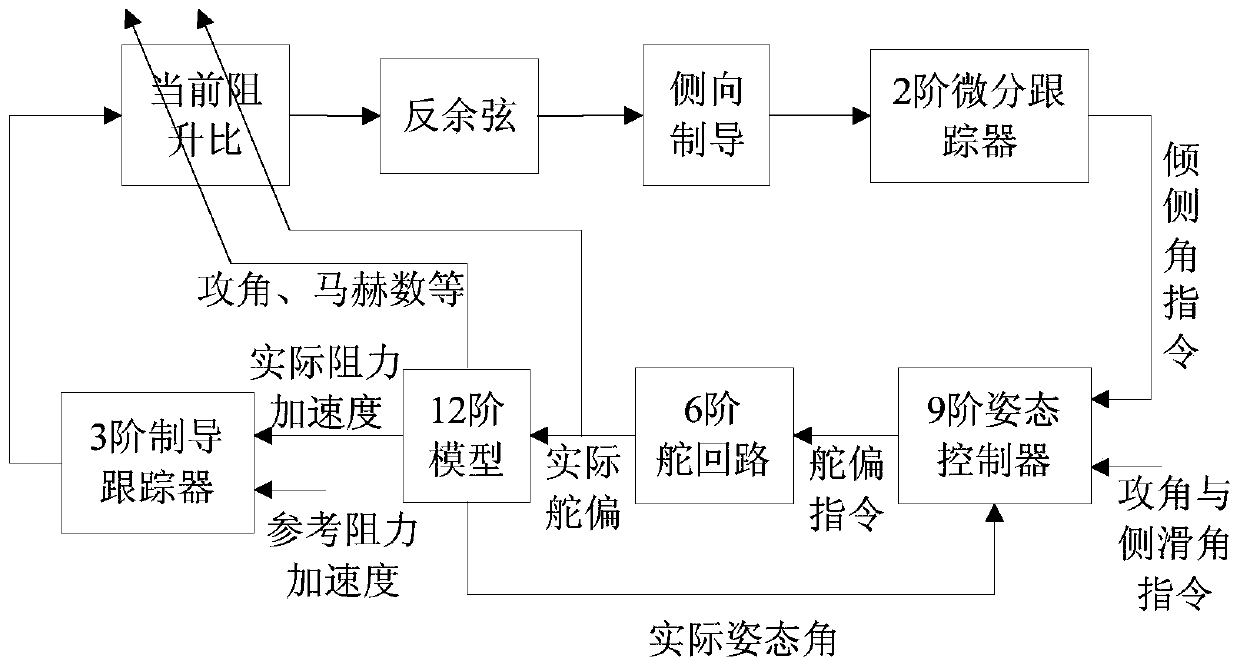
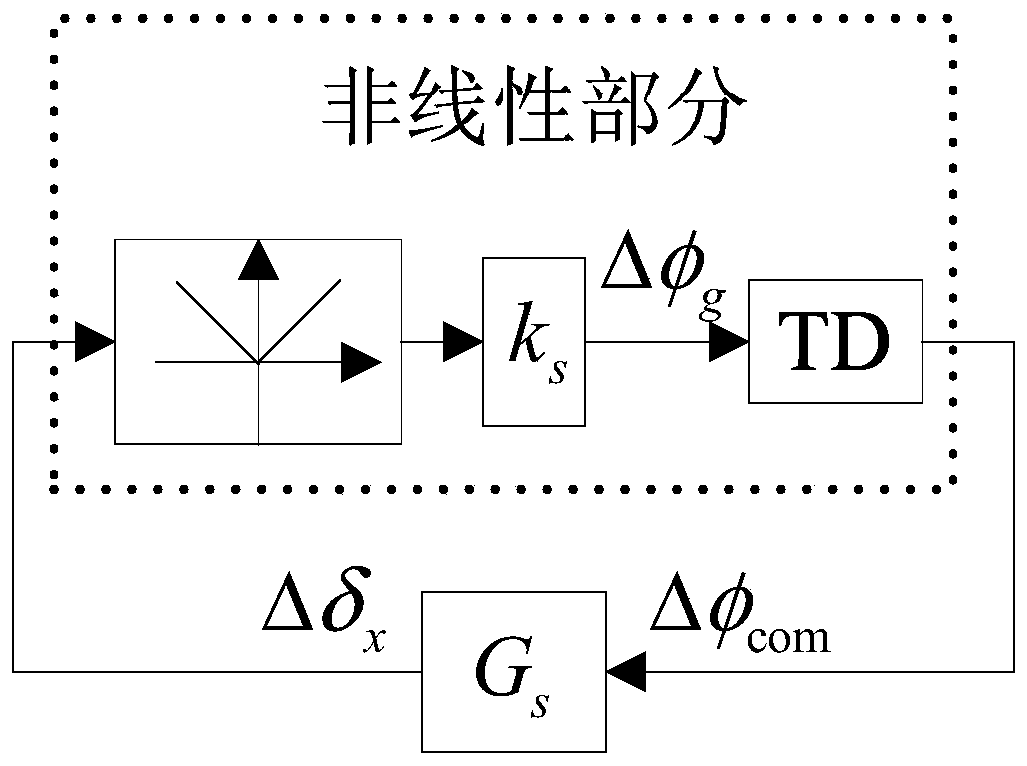
[0091] The structure of the guidance and control system of a hypersonic vehicle is as follows: figure 2 As shown, based on Lyapunov linearization and linear reduction order simplification, we get image 3 system. where the linear part transfer function is
[0092]
[0093] Each parameter in the above formula is a known model parameter or control parameter; k s is the known nonlinear part parameter;
[0094] The TD form of the fastest-tracking differentiator is
[0095]
[0096] In the above formula, v is the input of TD, η 1 is the output, and p is a known design parameter.
[0097] When A=0.00049896rad, k=0.3824, ω=6.7130rad / s, θ 0 When the value ranges from 0 to 360° (with an interval of 1°), the reciprocal curve of the description function of the nonlinear part and the Nyquist curve of the linear part are drawn respectively in Figure 4 , Figure 5 . when θ 0 = 202°, 1 / N A with G s (jω) distance and 1 / N B with G s The sum of the distances of (j2ω) is ...
Embodiment 2
[0099] A low-pass filter is connected in series after the tracking differentiator of Example 1, see Figure 7 . Similar to the process of example 1, traverse A, k, ω, θ in the range of attention 0 , it is found that there is no periodic oscillation in the system, and the actual roll rudder bias response can be seen in Figure 8 .
[0100] Increase the model parameter k s To the original 16 times, when A=0.000013254rad, k=0.1647, ω=11.5712rad / s, θ 0 The value range is 0~360°, the interval is 1°, and the reciprocal curve of the description function of the nonlinear part and the Nyquist curve of the linear part are drawn respectively. Figure 9 , Figure 10 . It can be found that when θ 0 =55°, 1 / N A with G s (jω) distance and 1 / N B with G s The sum of the distances of (j2ω) is 0.01206. It is predicted that the system with increased model parameters has double sinusoidal oscillations, so the stability margin of the original system is 24dB.
[0101] By comparing the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More