

Robot and elevator interaction system and method
An interactive system and robot technology, which is applied in the field of interaction between robots and elevators, can solve the problems that robots cannot take elevators to go up and down stairs, robots cannot be implemented, and line reconstruction is complicated, and achieves the effect of reducing waiting time for elevators, simple structure, and simple installation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
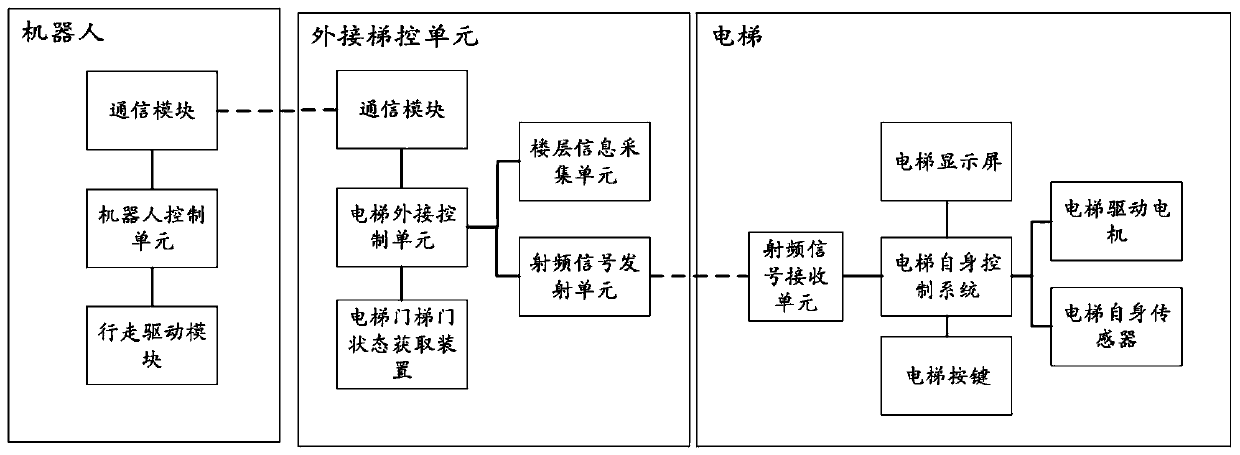
[0041] refer to figure 1 As shown, this embodiment is a robot-elevator interactive system, which includes a robot control unit installed on the robot, an elevator external control unit, and an elevator inherent control system; wherein the robot control unit is electrically connected to the walking drive module and the robot communication module; The elevator external control unit is connected to the elevator communication module, radio frequency signal transmitting unit, floor information acquisition unit, and elevator door state acquisition device; the elevator itself is equipped with a radio frequency signal receiving unit, which is electrically connected to the elevator's inherent control system to realize the user's card swiping Elevator ride function; the robot control unit establishes a communication connection with the elevator external communication module through the robot communication module, and finally realizes the communication connection with the elevator externa...
Embodiment approach
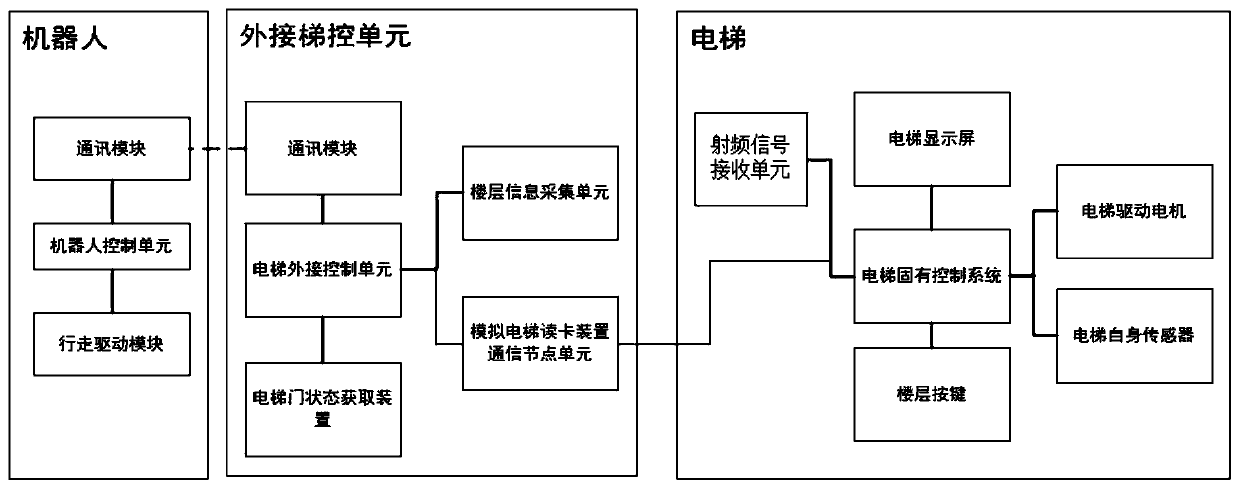
[0048] refer to figure 2 As shown, the difference between it and the above-mentioned Embodiment 1 is that the interactive system between the robot and the elevator also includes an analog elevator radio frequency signal receiving unit communication node unit, which is connected in parallel to the electronic signal circuit connected between the radio frequency signal receiving unit and the inherent control system of the elevator above, it is used to simulate the communication between the radio frequency signal receiving unit and the inherent control system of the elevator. The robot communication module is connected to the communication node unit of the analog elevator radio frequency signal receiving unit. The analog elevator radio frequency signal receiving unit communication node unit receives and responds to the signal and calls the elevator in place through the elevator inherent control system. The elevator external control unit sends the floor information to the elevator ...
Embodiment 3
[0051] In this embodiment, the elevator itself is not equipped with a radio frequency signal receiving unit. The elevator external control unit is connected to the floor buttons installed in the elevator. The inherent control system of the elevator has a plurality of floor interfaces corresponding to the number of floors. The control cables are respectively connected to a plurality of corresponding floor buttons on the floor buttons. The robot sends its own floor information to the elevator external control unit. The elevator external control unit simulates the manual pressing of the corresponding floor button by controlling the elevator button to call the elevator to the floor where the robot is. After the robot enters the elevator, it controls the elevator to go to the target floor in the same way as above. Complete the ladder action. Further, the elevator external control unit can be directly connected to the radio frequency signal receiving unit, so that while realizing th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More