

Robot joint structure and robot joint structure assembly method
A technology of a robot joint and an assembly method, applied in the field of robots, can solve the problems affecting the structural performance and life of the robot joint, the high requirements for the assembly ability of the robot connector, and the limited volume design of the robot, so as to achieve simple and convenient installation and maintenance. High operational feasibility and stability, avoiding the cumulative effect of machining errors and assembly errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038]In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
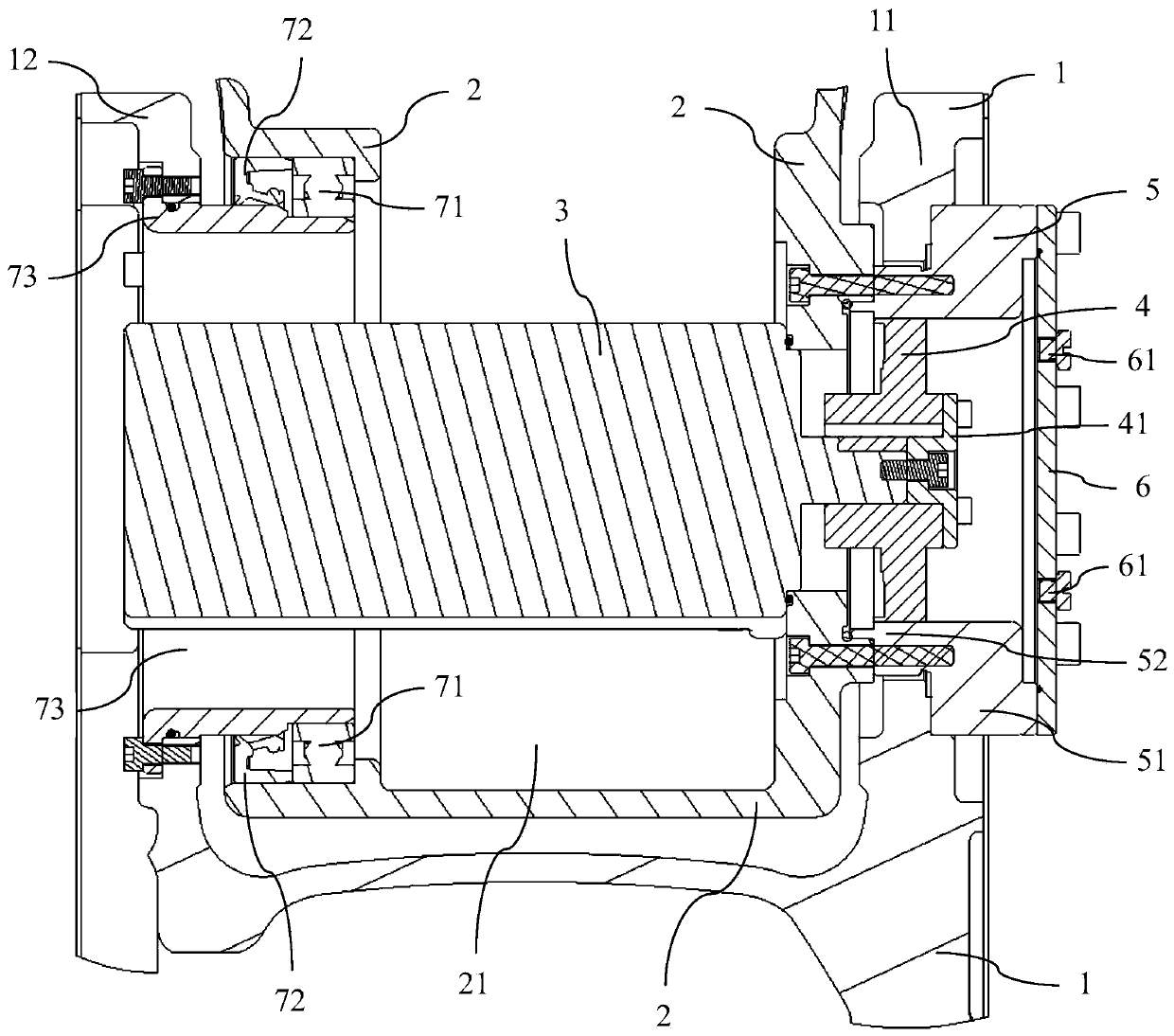
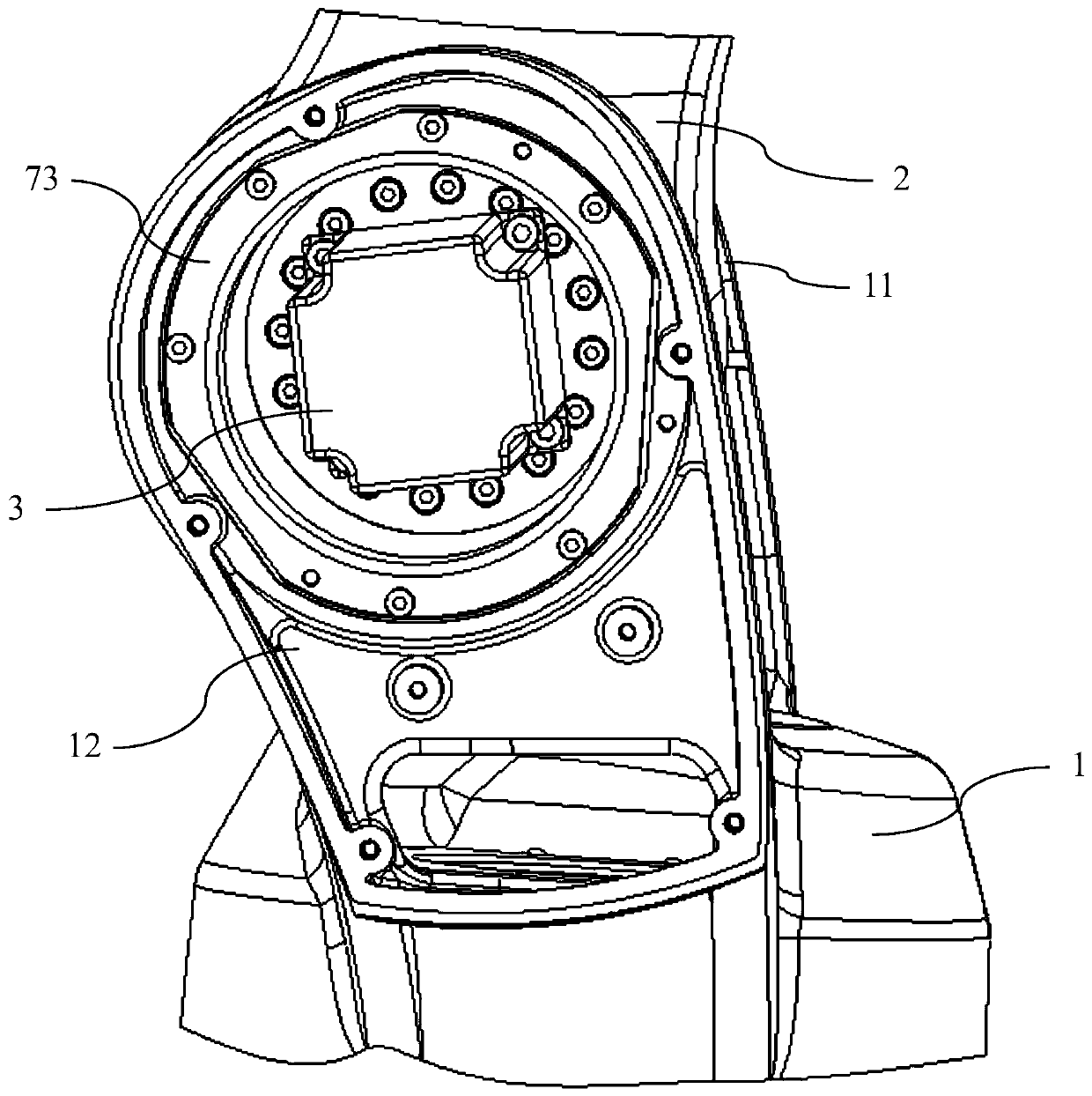
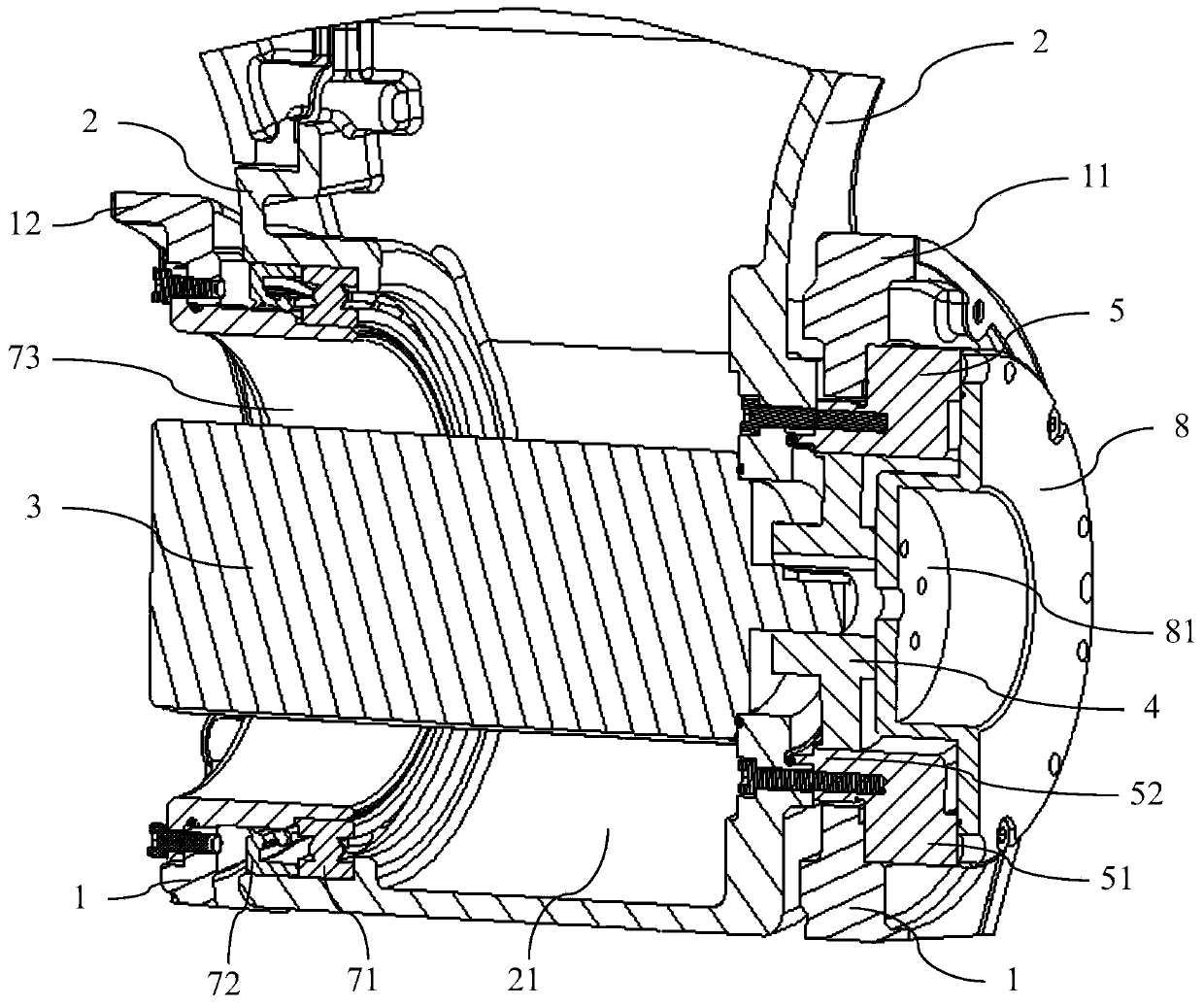
[0039] like figure 1 As shown, it is a schematic structural diagram of the robot joint structure provided by the embodiment of the present invention, which can be applied in the field of robotics, especially in the robot joint structure requiring a small volume. combine figure 2 As shown, the robot joint structure in this embodiment is used to connect the rocker arm 1 and the base 2 of the robot, and realize the relative rotation between the rocker arm 1 and the base 2, wherein the rocker arm 1 includes a Mounting cavity 21 .
[0040] Above-mentioned robot joint structure comprises drive motor 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More