

Bionic joint control system and method based on multi-motor drive
A multi-motor-driven, bionic joint technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of poor system robustness, high cost in high torque scenarios, slow response curves, etc., and achieve control flexibility. Poor, improve robustness reliability, solve the effect of poor variable stiffness performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
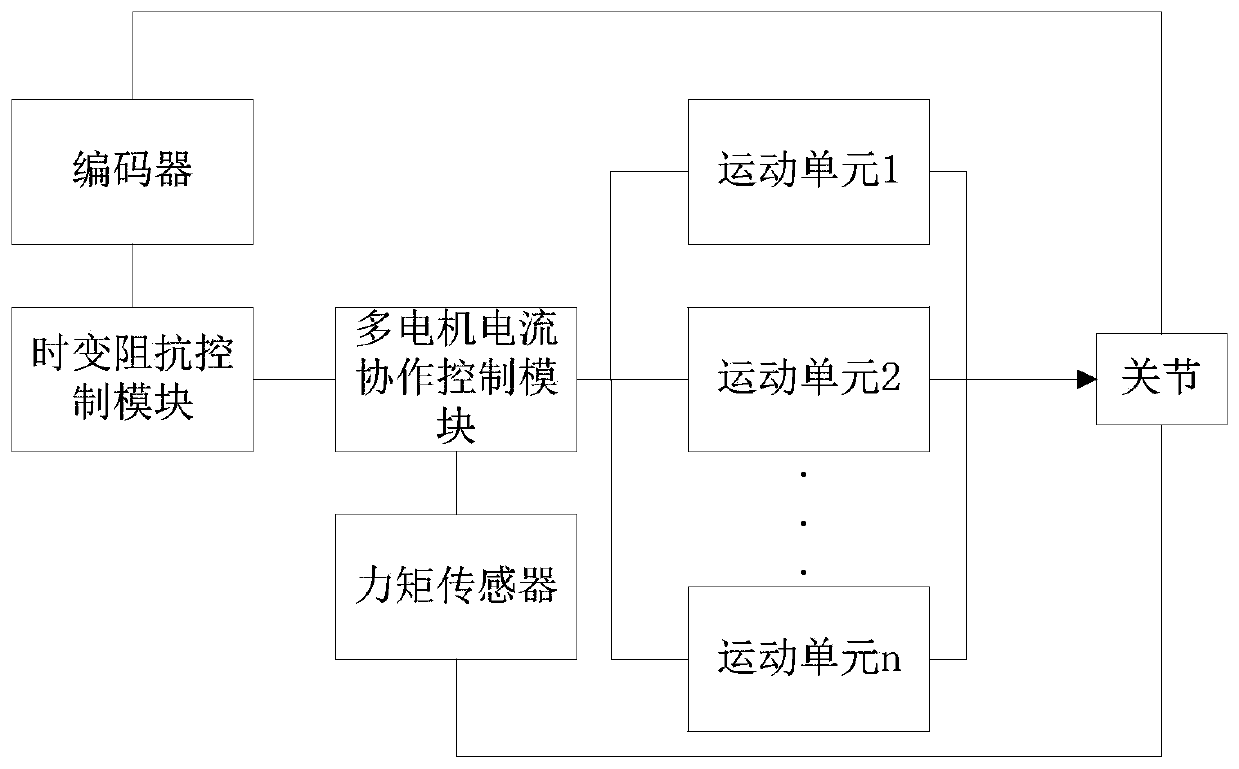
[0043] Such as figure 1 As shown, this embodiment provides a bionic joint control system based on multi-motor drive, including a time-varying impedance control module, a multi-motor current cooperative control module, an encoder, a torque sensor and a plurality of motion units, the plurality of motion units Acting in parallel on the joints, each of the motion units includes a motor and a driver, the time-varying impedance control module is connected to the encoder and the multi-motor current cooperative control module, and the multi-motor current cooperative control module is connected to the torque sensor and each driver respectively connect;
[0044] The encoder is used to obtain the angle information of the joint, and transmit the angle information to the time-varying impedance control module;
[0045] The torque sensor is used to obtain the torque information of the joint, and transmit the torque information to the multi-motor current cooperative control module;
[0046]...
Embodiment 2
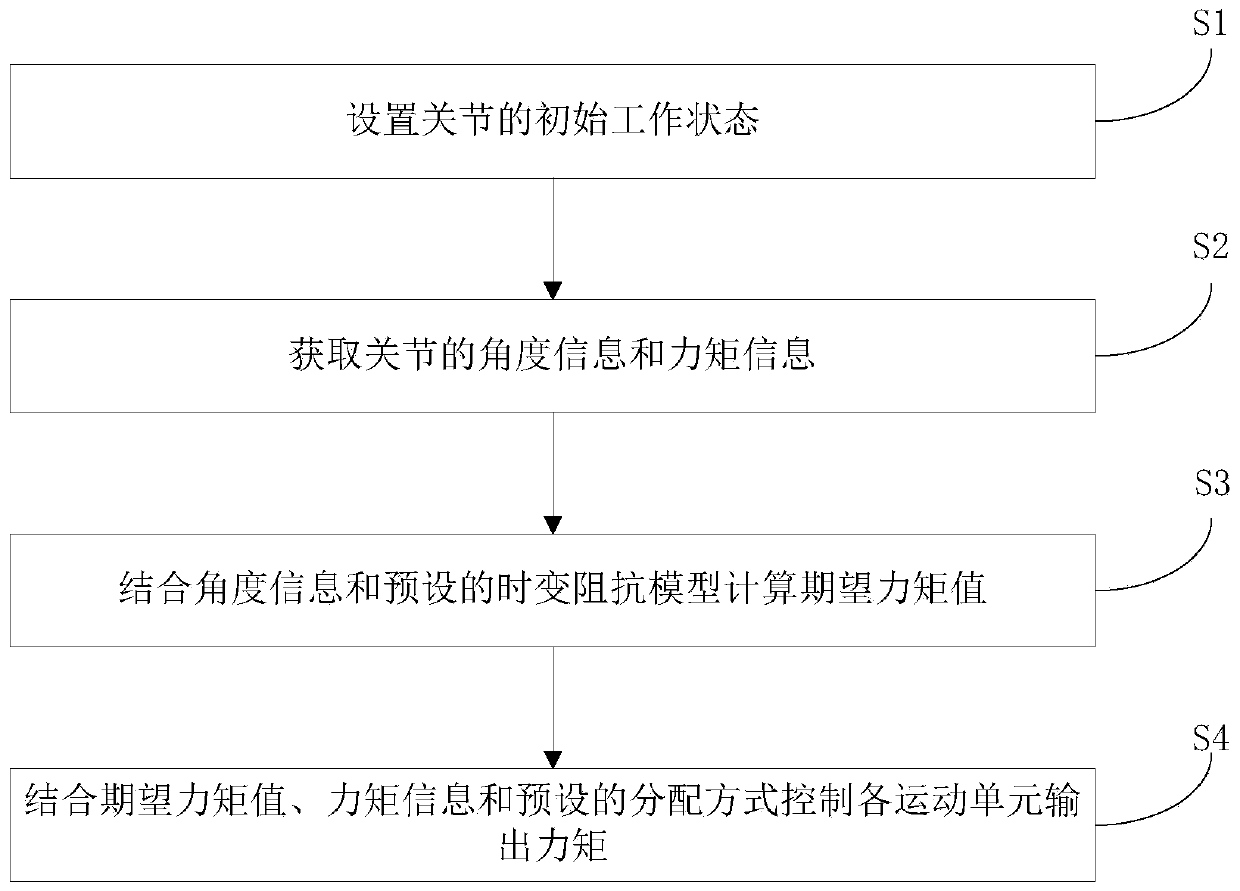
[0060] Such as figure 2 As shown, this embodiment provides a bionic joint control method based on multi-motor drive, including the following steps:
[0061] S1. Set the initial working state of the joint;
[0062] S2. Obtain angle information and moment information of the joint;
[0063] S3. Combining the angle information and the preset time-varying impedance model to calculate the expected torque value;
[0064] S4. Control the output torque of each motion unit in combination with the expected torque value, torque information and preset distribution mode.
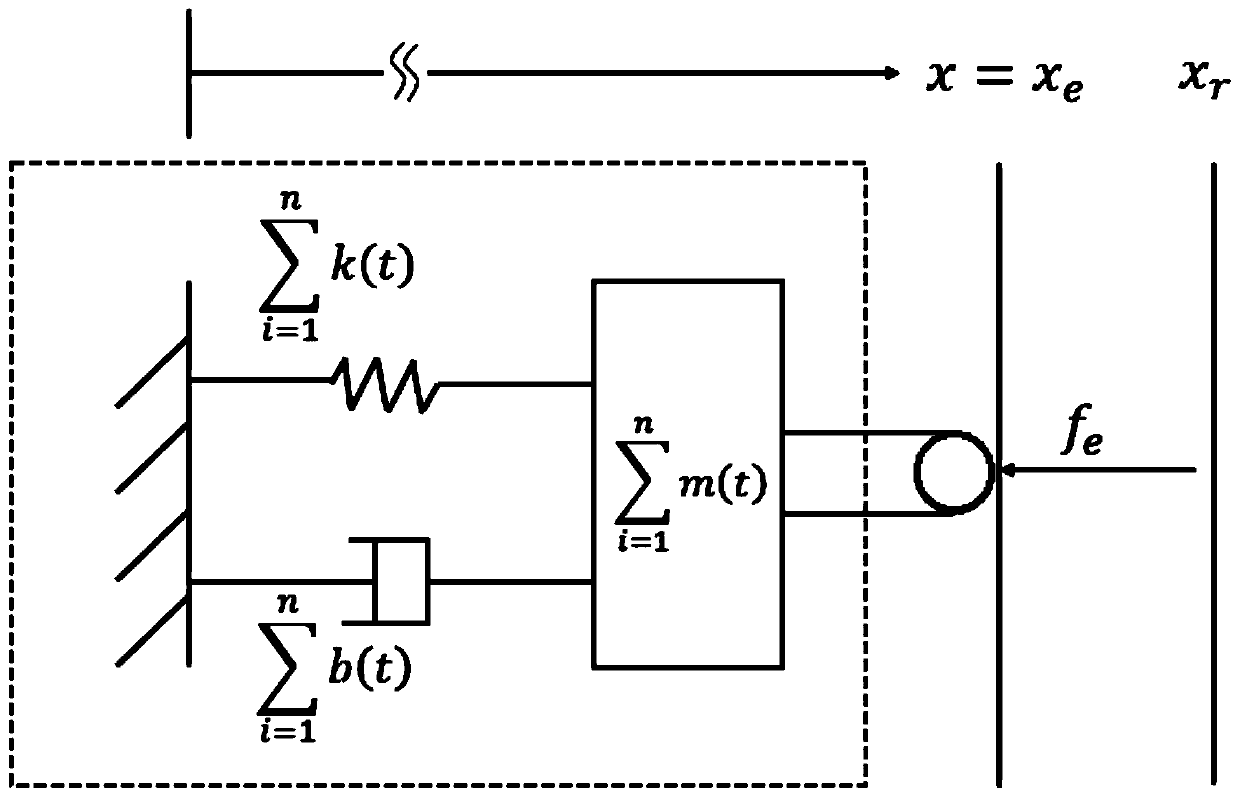
[0065] First set the initial working state of the joint, the joint starts to work in the initial state, collect the angle information at the joint in real time through the encoder or gyroscope and other equipment, collect the torque information at the joint through the torque sensor, and adjust the stiffness of the joint according to the angle information, And calculate the expected torque value according to the chang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More