

Reconstruction method based on point-line feature rapid fusion
A feature fusion and point feature technology, applied in the field of reconstruction based on the rapid fusion of point and line features, can solve the problems of unreliable results and small number of 3D point clouds, and achieve fast extraction and matching, small reprojection error, and accurate extraction Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
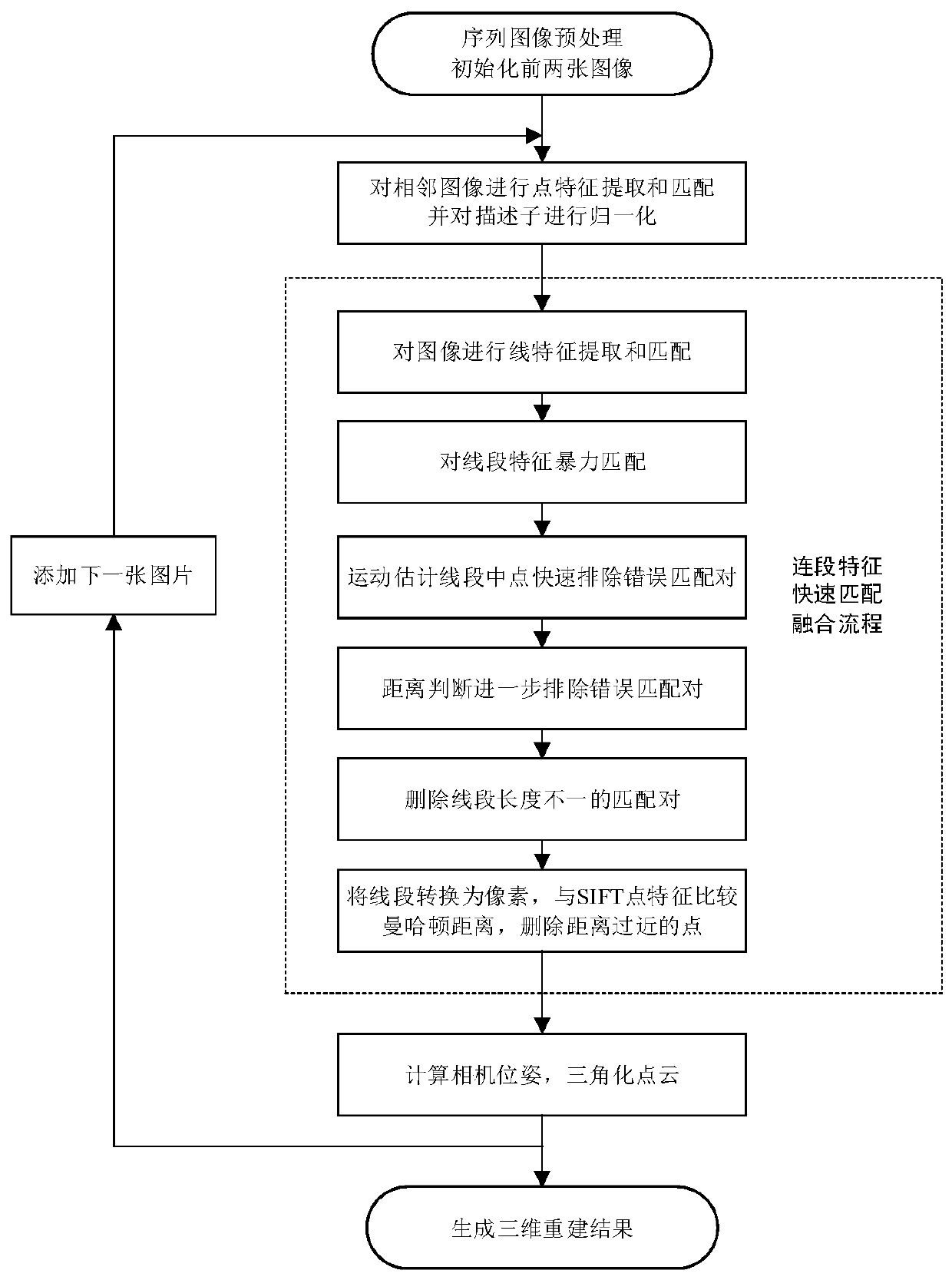
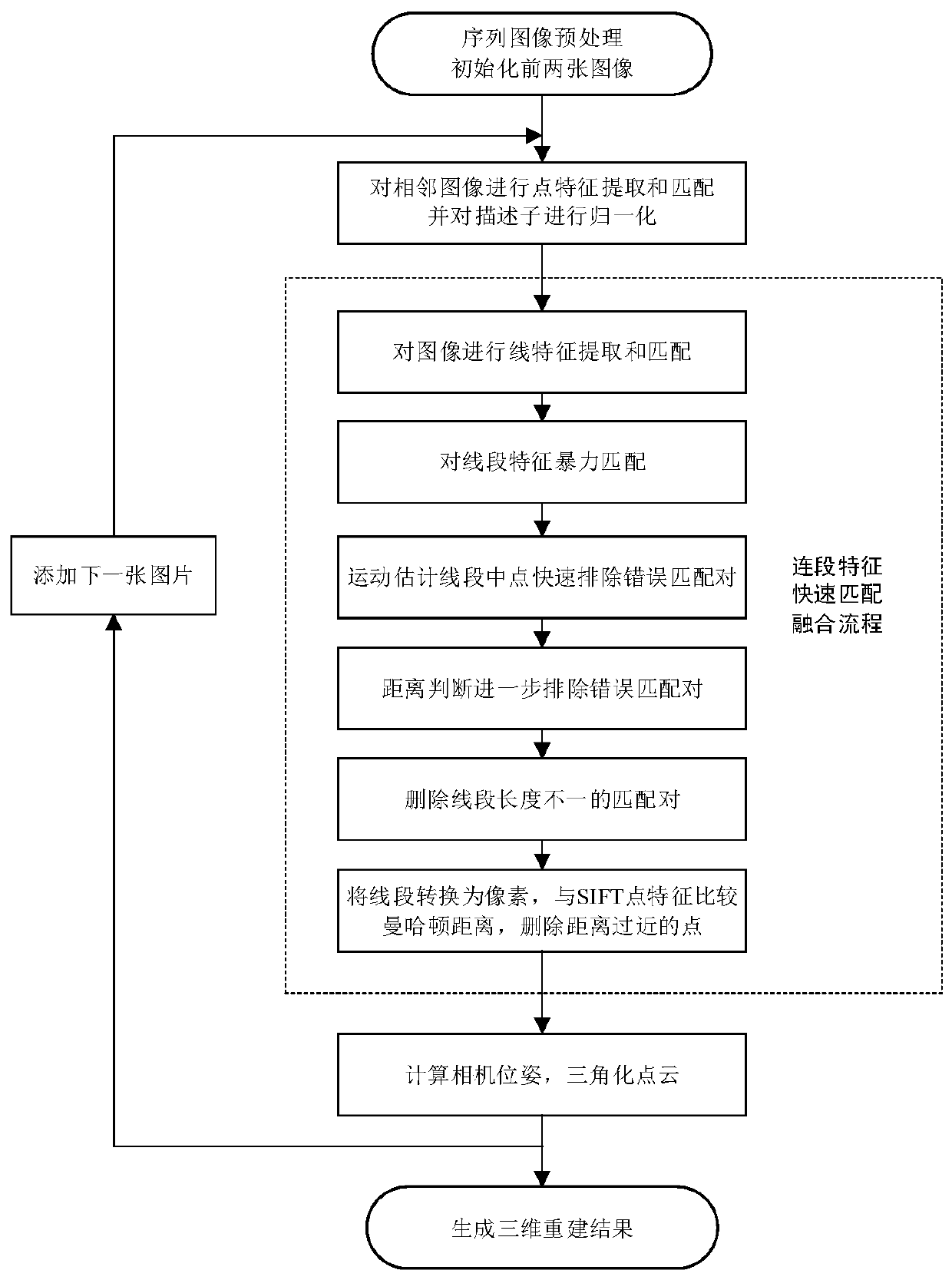
[0021] refer to figure 1 : figure 1 The dotted line part is the rapid fusion process of the dotted line feature in the present invention. From figure 1 It can be seen that the point features of the sequence images are first matched and the descriptors are normalized. Then the line segment features are matched from coarse to fine, and finally the point line features are fused to participate in the 3D reconstruction.
[0022] The present invention uses the Swiss Federal Institute of Technology multi-view collection data set fountain-P11 to carry out sparse 3D reconstruction, the experimental environment is a Vmware Ubuntu16.04 virtual machine, the hardware configuration is a 4-core processor with 8G memory, and GPU is not used for acceleration. Use Opencv4.0 to write 3D reconstruction program. Through the experiment process, make further explanation.
[0023] Step 1: Image preprocessing. The dataset includes 11 time-series images with a size of 3072*2048 pixels. Use the E...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More