A robot indoor positioning and autonomous navigation system
An autonomous navigation system and indoor positioning technology, applied in the field of automatic control, can solve the problems of limited number of signs, high cost, limited human resources, etc., and achieve the effect of being conducive to market realization, reducing system costs, and enhancing autonomous navigation capabilities.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
[0019] Embodiments of the present invention provide a robot indoor positioning and autonomous navigation system and method.
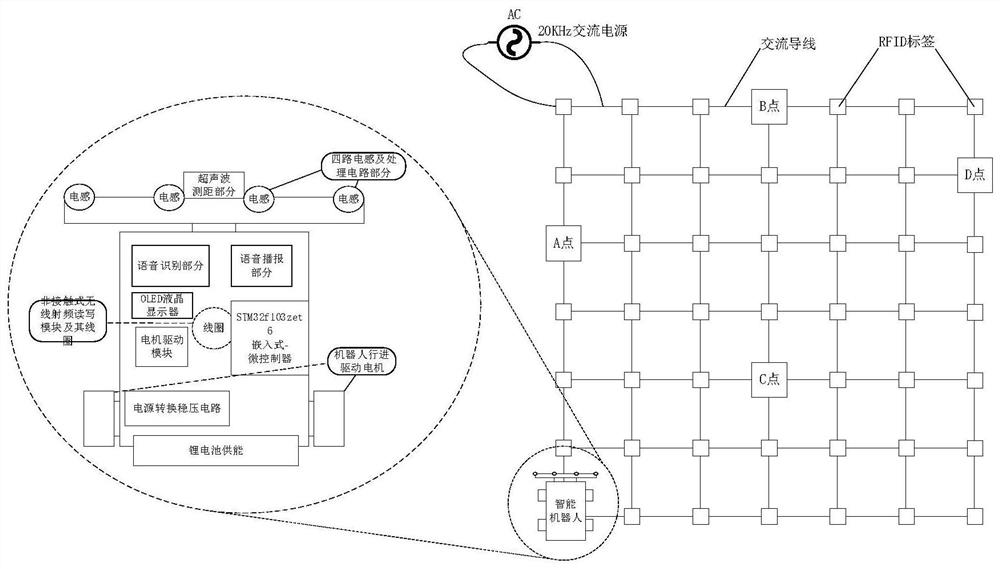
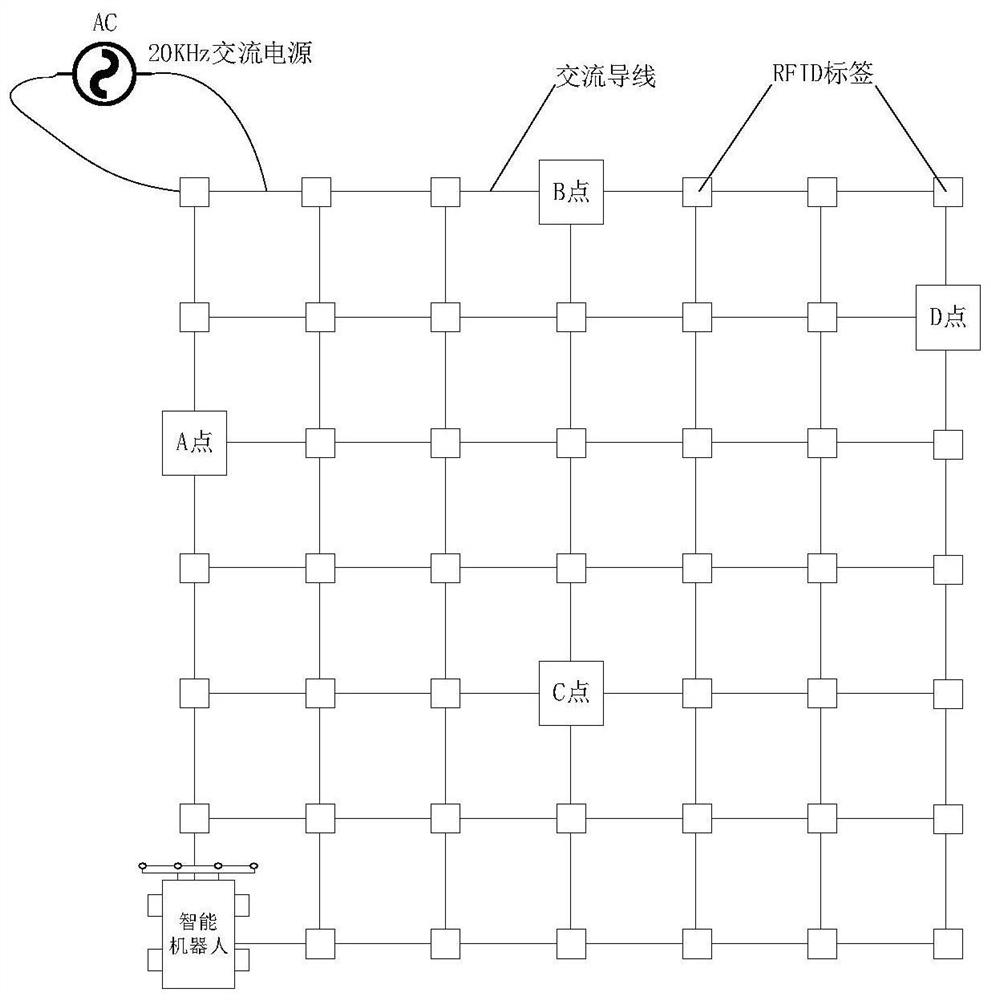
[0020] Please refer to figure 1 , figure 1 It is a structural diagram of a robot indoor positioning and autonomous navigation system in an embodiment of the present invention. The indoor ground is laid in advance as a whole figure 2 In the shown 20KHz mesh alternating magnetic field track, the intersection of the mesh alternating magnetic field track is a node, and the side length of the mesh structure is small, that is, the distance between two adjacent nodes is small. In this embodiment, The distance between two adjacent nodes is 1m; each node is installed with a small IC card that can be re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com